FANUC发那科机器人工具坐标系的设置与使用三点示教法
时间:2019-07-13 来源:互联网 阅读次数:
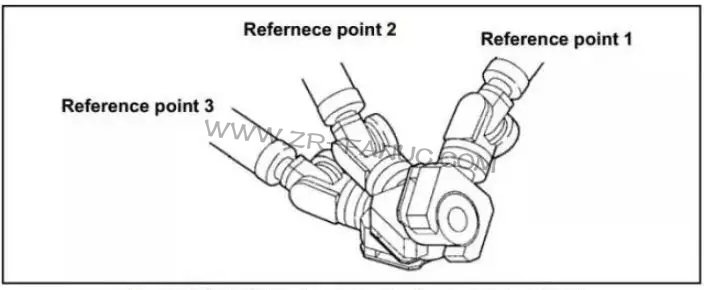
三点示教法( TCP自动设定 ) 设定工具中心点(工具坐标系的x、y、z)。进行示教,使参考点1、2、3以不同的姿势指向一点。由此自动计算TCP的位置。要进行正确的设定,应尽量使三个趋近方向各不相同。 具体步骤: 1. 按下 [MENU] (菜单)键,显示出画面菜单……
三点示教法( TCP自动设定 )
设定工具中心点(工具坐标系的x、y、z)。进行示教,使参考点1、2、3以不同的姿势指向一点。由此自动计算TCP的位置。要进行正确的设定,应尽量使三个趋近方向各不相同。
具体步骤:
1. 按下 [MENU] (菜单)键,显示出画面菜单。
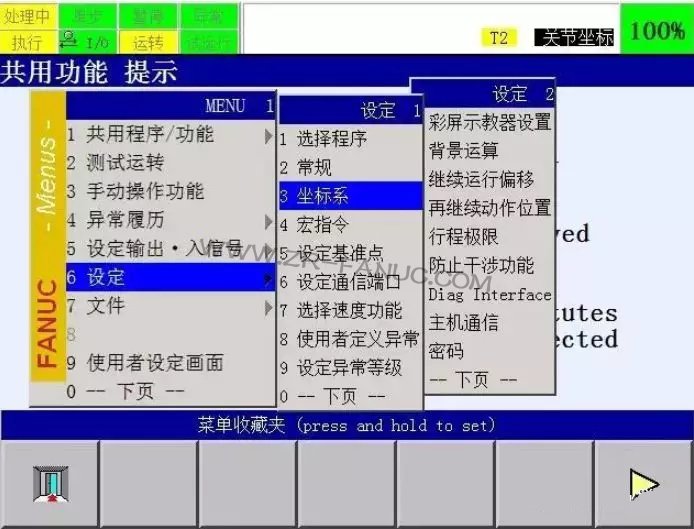
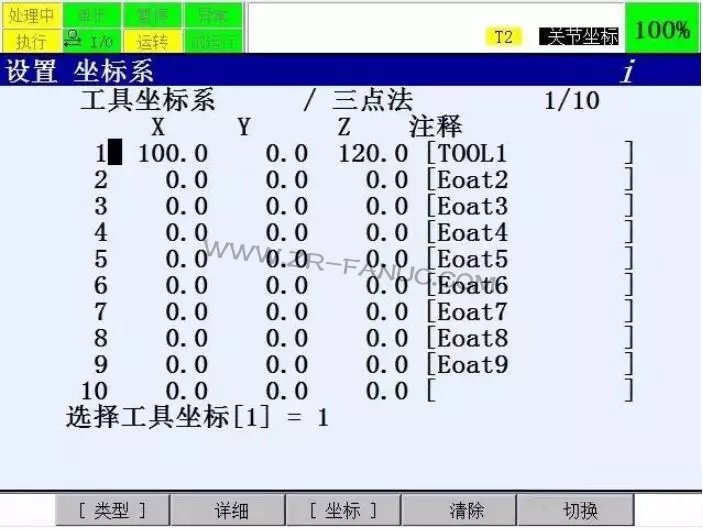
2. 选择“ 设定 ”,光标右移选择 “ 坐标系 ”。出现工具坐标系一览画面。

3. 将光标指向将要设定的工具坐标系号码所在行。
4. 按下F2“详细”。出现所选的坐标系号码的工具坐标系设定画面。
5. 按下F2“方法”。
6. 选择“三点法”。

7. 输入注释a 将光标移动到注释行,按下ENTER(输入)键。b 选择使用单词、英文字母。c 按下适当的功能键,输入注释。d 注释输入完后,按下 ENTER 键。

8. 记录各参照点。使参考点1、2、3以不同姿势指向一点。此处以如下姿势为例:
1) 记录接近点1:
a. 移动光标到接近点1(Approach point 1);
b. 把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
c. 按【SHIFT】+ F5【RECORD】(位置记录)记录。

2) 记录接近点2:
a. 沿全局坐标(WORLD)+Z方向移动机器人50mm左右;
b. 移动光标到接近点2(Approach point 2);
c. 把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过180度;
d. 把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到准点;
e. 按【SHIFT】+ F5【RECORD】(位置记录)记录;
f. 沿全局坐标(WORLD)的+Z方向移动机器人50mm左右;

3) 记录接近点3:
a. 移动光标到接近点3(Approach point 3);
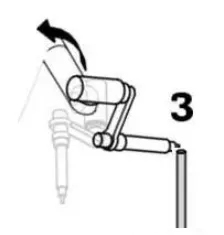
b. 把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
c. 把示教坐标切换成全局坐标(WORLD),移动机器人,使工具尖端接触到基准点;
d. 按【SHIFT】+F5【RECORD】(位置记录)记录;
e. 沿全局坐标(WORLD)的+Z方向移动机器人50mm左右;
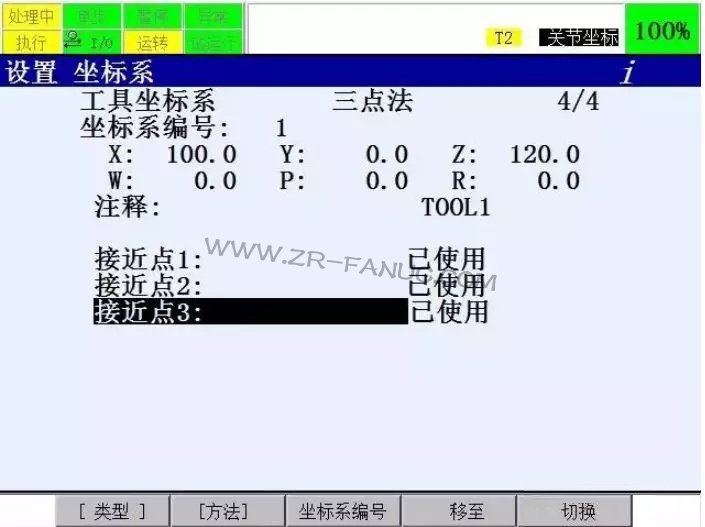
9. 对所有参考点都进行示教后,显示“已使用”。工具坐标系即被设定。10. 再按住SHIFT键的同时按下F4“移至”,即可使机器人移动到所记录的点。11. 要确认已记录的各点的位置数据,可以将光标指向各参考点,按下ENTER键来查看各点的详细位置数据。要返回原先的画面,按下PREV(返回)键。12. 按下PREV(返回)键,显示工具坐标系一览画面。可以确认所有工具坐标系的设定值。
13. 要将所设定的工具坐标系作为当前有效的工具坐标系来使用,按下F5 “切换”,并输入坐标系号码。
注意:若不按下 F5 “切换”,所设定的坐标系就不会有效。也可以使用SHIFT + COORD来选择需要使用的坐标系号码。
14. 要清除所设定的坐标系数据,按下F4 “清除”。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
相关资讯
- 发那科搬运机械手保养秘籍(2025-07-22)
- 发那科M-1000iA机械手保养维护方法(2025-05-26)
- 法兰克搬运机械手保养_机器人注油维护(2024-08-19)
- 发那科R-2000iC搬运机器人保养要点(2024-05-27)
- FANUC发那科M-900iA搬运机器人维修保养经验总结(2024-04-10)
- FANUC发那科M-70iC搬运机器人维修保养攻略分享(2024-04-10)

声明:本站提及的品牌仅用于说明维修机型,本公司未获得品牌授权,非官方授权售后。子锐机器人是一家独立的第三方机器人技术服务商,为客户提供更高效率、更优成本、更全服务的选择。
