什么是发那科机器人坐标系
时间:2019-07-26 来源:互联网 阅读次数:
坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。坐标系有关节坐标系、 关节坐标系关节坐标系是设定在机器人的关节中的坐标系。关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。 下图中的关节坐……
坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。坐标系有关节坐标系、
关节坐标系关节坐标系是设定在机器人的关节中的坐标系。关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。
下图中的关节坐标系的关节值,处在所有轴都为0°的状态.
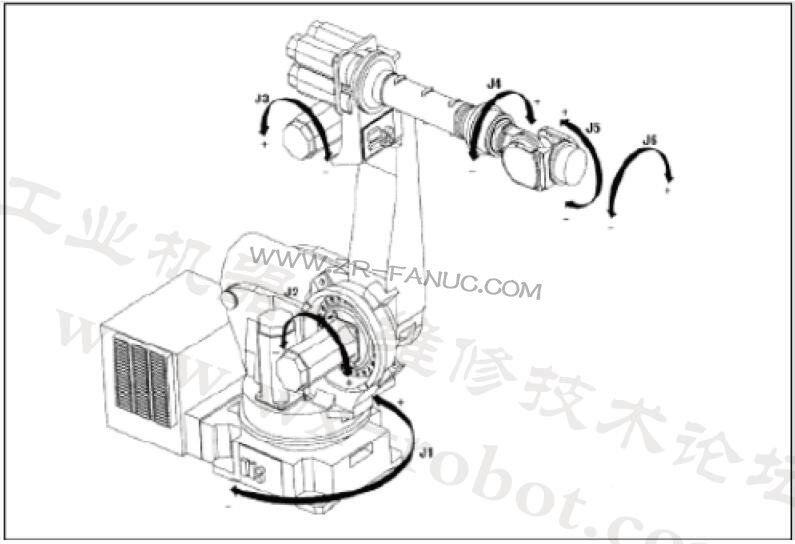
关节坐标系
刀具坐标系这是用来定义刀尖点(TCP)的位置和刀具姿势的坐标系.刀具坐标系必须事先进行设定.位定义时.将由机械接口坐标系代替刀具坐标系。
世界坐标系世界坐标系, 是被固定在空间上的标准笛卡尔坐标系, 其被固定在机器人事先确定的位置。用户坐标系基于该坐标系而设定。她用于位置数据的示教和执行。
用户坐标系用户坐标系, 是用户对每个作业空间进行定义的笛卡尔坐标系。它用于位置寄存器的示教和执行、位置补偿指令的执行等。位定义时将由世界坐标系来替代该坐标系。
注:在程序示教后改变了刀具或用户坐标系的情况下,必须重新设定程序的各示教点和范围。否则,恐会损坏装置。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
相关资讯
- 法那科弧焊机械手保养从这步开始(2024-08-15)
- FANUC发那科焊接机器人维修保养技巧(2025-01-13)
- GFC-R01-N03节约气体成本,焊接机器人节气设备混合气节气装置(2020-09-28)
- FANUC发那科机器人安装照相机的方式(2019-11-16)
- FANUC发那科机器人有哪些动作指令(2019-07-27)
- 发那科焊接机器人M-10iA搬家搬迁安装位移专业服务(2018-05-22)

声明:本站提及的品牌仅用于说明维修机型,本公司未获得品牌授权,非官方授权售后。子锐机器人是一家独立的第三方机器人技术服务商,为客户提供更高效率、更优成本、更全服务的选择。
