-
 发那科FANUC机器人M-410iB平衡缸维修问题集合
2024-04-26 发那科机器人维修
发那科FANUC机器人M-410iB平衡缸维修问题集合
2024-04-26 发那科机器人维修发那科机器人作为工业机器人领域的领导者,其产品广泛应用于各种生产制造领域。平衡缸作为发那科机器人的重要部件,在保证机器人动作稳定和精确方面起着关键作用。 ...[查看全文]
-
 发那科FANUC机器人A05B-2301-C335示教器维修思路
2024-04-26 示教器维修
发那科FANUC机器人A05B-2301-C335示教器维修思路
2024-04-26 示教器维修随着工业自动化程度的不断提高,机器人已成为生产线上不可或缺的一部分。其中,示教器是机器人控制系统的重要部件,用于传输指令、调整参数等。然而,示教器在长期使用过程中难免会出现FANUC机械手A05B-2301-C335示教盒故障,因此掌握一定的发那科机械臂示教 ...[查看全文]
-
 发那科FANUC机器人控制柜维修故障检测
2024-04-25 发那科机器人维修
发那科FANUC机器人控制柜维修故障检测
2024-04-25 发那科机器人维修FANUC发那科机器人控制柜是机器人的核心部件,控制着机器人的运动、动作和程序执行。在日常使用中,控制柜容易受到各种因素影响而出现故障,影响机器人的稳定性和性能。因此,维修发那科机械手控制柜非常重要,需要对法兰克机械臂控制箱故障原因和处理方法有 ...[查看全文]
-
 FANUC发那科机器人减速机维修小技巧
2024-04-25 发那科机器人维修
FANUC发那科机器人减速机维修小技巧
2024-04-25 发那科机器人维修FANUC发那科机器人作为一种广泛应用于工业领域的自动化设备,其减速机是关键部件之一。然而,减速机在长期使用过程中,难免会出现各种法兰克机械手齿轮箱故障,其中FANUC机械臂减速机维修是一项重要的工作。 ...[查看全文]
-
 FANUC发那科机器人A16B-2202-0432主板维修思路
2024-04-24 电路板维修
FANUC发那科机器人A16B-2202-0432主板维修思路
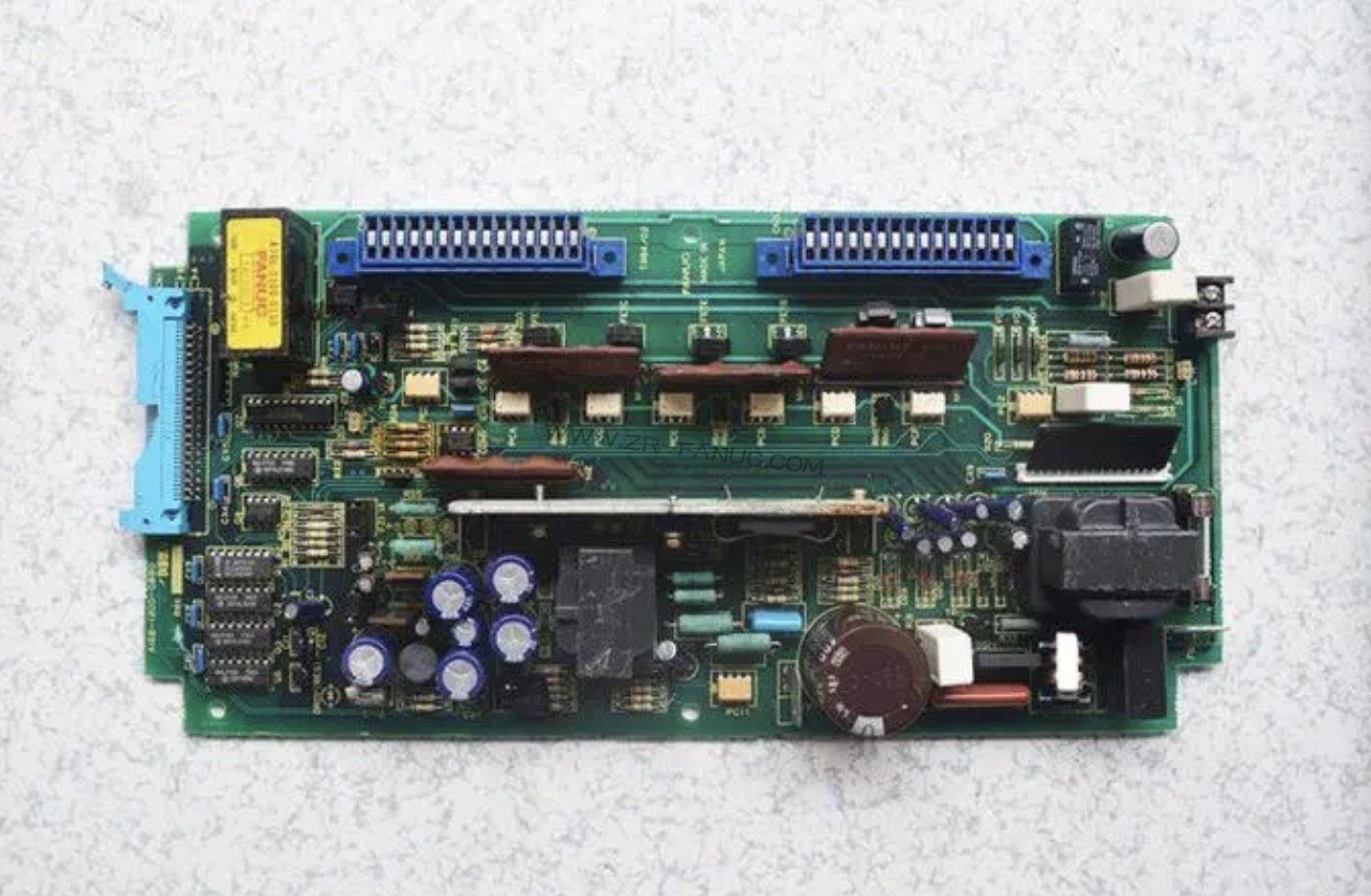
2024-04-24 电路板维修在自动化与精密制造的浪潮中,FANUC发那科机器人凭借其卓越性能与可靠性成为了行业的佼佼者。板卡板是机器人核心部件之一,负责控制机器人的运动、操作和安全等功能。电路板由各种电子元件和集成电路组成,具有高精度的特点。当出现发那科机械手电路板故障时 ...[查看全文]
-
 FANUC发那科机器人A06B-0651-B011电机维修故障诊断
2024-04-24 伺服电机维修
FANUC发那科机器人A06B-0651-B011电机维修故障诊断
2024-04-24 伺服电机维修FANUC发那科机器人作为现代工业生产中的重要设备,其稳定性和可靠性对于生产线的正常运行至关重要。电机作为机器人核心部件之一,一旦出现发那科机械臂伺服马达故障,将会严重影响生产进度和产品质量。因此,掌握FANUC机器人电机维修故障诊断对于企业来说尤为 ...[查看全文]
-
 FANUC发那科机器人平衡缸维修主要思路
2024-04-22 发那科机器人维修
FANUC发那科机器人平衡缸维修主要思路
2024-04-22 发那科机器人维修FANUC发那科机器人是一种广泛用于制造业的高精度、高效率自动化设备。而发那科机械臂平衡缸是机器人的重要组成部分,用于保证机器人的稳定性与可靠性。但在使用过程中,由于各种原因,可能会发生FANUC机械手平衡缸故障,导致机器人的运行出现问题。 ...[查看全文]
-
 FANUC发那科机器人M-200iC减速器维修具体细节
2024-04-22 发那科机器人维修
FANUC发那科机器人M-200iC减速器维修具体细节
2024-04-22 发那科机器人维修FANUC发那科机器人减速器作为机器人核心部件之一,其性能稳定性直接影响到机器人的工作效果。本文将详细介绍FANUC发那科机器人减速器维修具体细节,确保机器人正常运行。 ...[查看全文]
-
 FANUC发那科机器人M-2000iA驱动器维修宝典
2024-04-19 驱动器维修
FANUC发那科机器人M-2000iA驱动器维修宝典
2024-04-19 驱动器维修当你发现机器人失控时,你可以尝试用检查的方式进行发那科机械手故障诊断。经过简单的检查步骤看来,如果出现FANUC机械臂伺服驱动故障时,别紧张,下面我们就来看看有什么法兰克机械手驱动器维修方法。 ...[查看全文]
-
 FANUC发那科机器人电机维修故障诊断
2024-04-16 伺服电机维修
FANUC发那科机器人电机维修故障诊断
2024-04-16 伺服电机维修发那科机器人以其出色的性能、精准的动作控制和高度的可靠性,其中,电机作为机器人运动执行的核心组件,在长期作业中难免遇到发那科机械手电机故障,因此,FANUC发那科机器人电机维修显得尤为重要。在FANUC发那科机器人电机维修过程中遇到复杂问题时,建议联 ...[查看全文]
-
 Fanuc发那科机器人维修小窍门
2024-04-15 发那科机器人维修
Fanuc发那科机器人维修小窍门
2024-04-15 发那科机器人维修作为Fanuc发那科机器人用户,您一定了解FANUC机械臂人维修对于设备稳定运行的重要性。在日常使用中,一些小问题可能会影响到机器人的正常运行。为了帮助您更好地维护发那科机器人,我们整理了一些小窍门,让发那科机械手维修变得更加轻松。 ...[查看全文]
-
 FANUC发那科机器人TR-510iA齿轮箱维修一步步操作,轻松搞定!
2024-04-11 发那科机器人维修
FANUC发那科机器人TR-510iA齿轮箱维修一步步操作,轻松搞定!
2024-04-11 发那科机器人维修FANUC发那科机器人TR-510iA齿轮箱故障维修是一项复杂而重要的工作。通过联系子锐机器人维修的正确发那科机器人齿轮箱故障诊断和FANUC机械手齿轮箱维修步骤,可以有效地修复齿轮箱故障,恢复机器人的正常工作。 ...[查看全文]
-
 FANUC发那科机器人M-2000iA电路板维修,需要注意哪些常见故障?
2024-04-11 电路板维修
FANUC发那科机器人M-2000iA电路板维修,需要注意哪些常见故障?
2024-04-11 电路板维修随着工业自动化技术的不断发展,发那科机器人作为其中的佼佼者,被广泛应用于各种生产场景中。然而,即使是高质量的机器人设备,也不能避免发那科机器人M-2000iA电路板故障问题。因此,FANUC发那科机器人M-2000iA电路板维修显得尤为重要。 ...[查看全文]
-
 如何进行FANUC发那科机器人R2000iC示教器维修
2024-04-11 示教器维修
如何进行FANUC发那科机器人R2000iC示教器维修
2024-04-11 示教器维修发那科(FANUC)作为知名的工业机器人制造商,其FANUC发那科机器人R2000iC示教器在工业自动化领域具有广泛的应用。在日常使用过程中也难免会遇到FANUC发那科机器人R2000iC示教器故障。因此,发那科机器人R2000iC示教器维修显得尤为重要。 ...[查看全文]
-
 发那科FANUC机器人A16B-2202-0900电路板维修分享
2024-04-11 电路板维修
发那科FANUC机器人A16B-2202-0900电路板维修分享
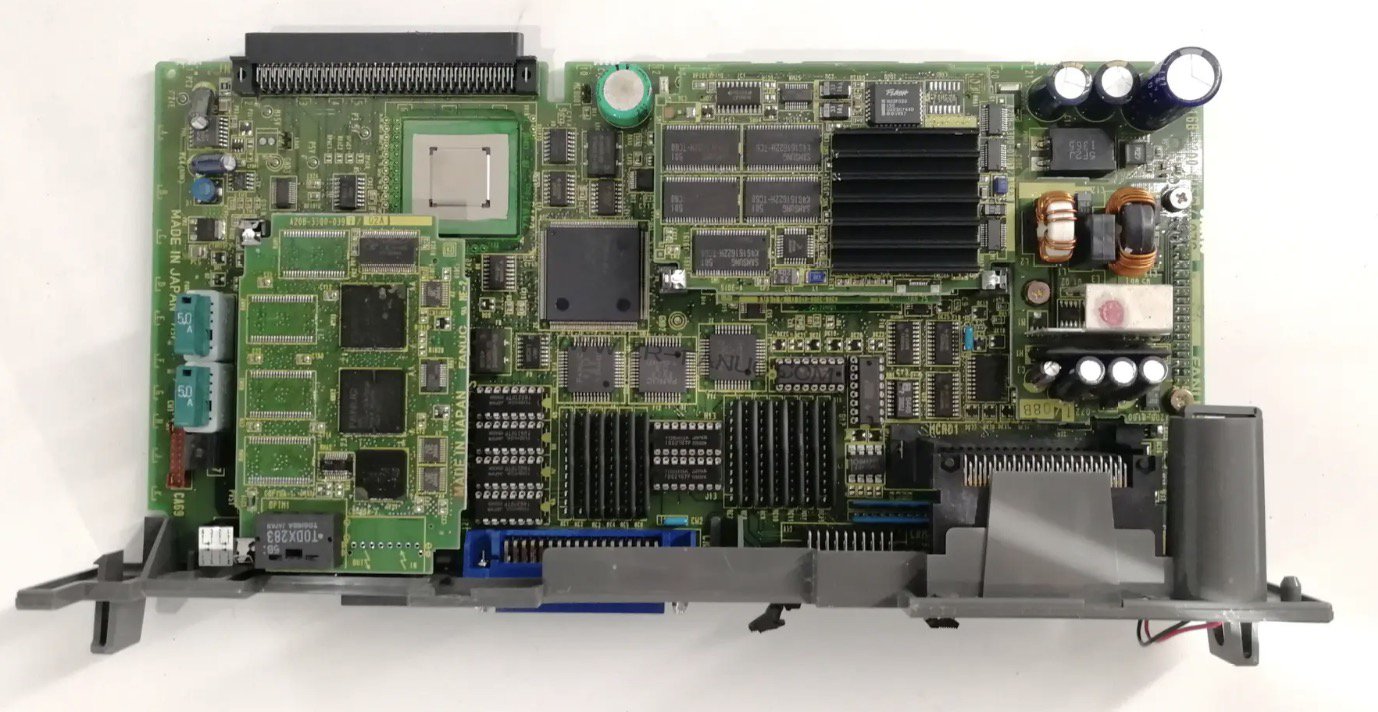
2024-04-11 电路板维修发那科机器人作为知名的工业机器人品牌,其电路板是机器人的核心控制单元。一旦出现发那科FANUC机器人A16B-2202-0900电路板故障,机器人的基本功能将受到严重影响,导致生产线的停滞和效率降低。因此,及时对发那科机械手电路板维修对于保障机器人的稳定运行至关重要。 ...[查看全文]


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7