-
 伺服电机维修案例之003紧急时自动停机开关
2018-03-26 伺服电机维修
伺服电机维修案例之003紧急时自动停机开关
2018-03-26 伺服电机维修一、案例情形: SRVO - 003 Deadman switch released [现象] 在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 二、解决方法: [对策 1]按下紧急时自动停机开关并使机器人操作。 [对策 2]更换示教操作盘。 ...[查看全文]
-
伺服电机维修案例之002示教操作盘紧急停止
2018-03-26 伺服电机维修
一、案例情形: SRVO - 002 Teach pendant E-stop [现象] 按下了示教操作盘的紧急停止按扭。 二、解决方法: [对策 1]解除示教操作盘的紧急停止按扭。 [对策 2]更换示教操作盘。 ...[查看全文]
-
伺服电机维修案例之001操作面板紧急停止
2018-03-26 伺服电机维修
一、案例情形: 伺服 - 001 操作面板紧 急停止( SRVO - 001 Operator panel E-stop) [现象] 按下了操作箱/操作面板的紧急停止按扭。 二、原因分析: SYST-067 面板 HSSB 断线报警同时发生,或者配电盘上的 LED(绿色)熄灭时,主板(JRS11) -配电盘 ...[查看全文]
-
 发那科Fanuc伺服电机内置脉冲编码器故障351、368报警该如何解决
2018-03-26 伺服电机维修
发那科Fanuc伺服电机内置脉冲编码器故障351、368报警该如何解决
2018-03-26 伺服电机维修发那科Fanuc伺服电机内置脉冲编码器故障351、368报警,原因是由于B轴伺服电机内置脉冲编码器通信异常。 ...[查看全文]
-
发那科Fanuc伺服放大器F436的故障解决方案
2018-03-26 伺服电机维修
本文介绍发那科Fanuc伺服放大器在加工过程中显示“436 Y轴过载”报警的故障原因及维修方法 ...[查看全文]
-
发那科Fanuc伺服放大器F411的故障解决方案
2018-03-26 伺服电机维修
发那科Fanuc伺服放大器在加工过程中显示“F411B轴误差过大”报警,本文提供了其维修方法。 ...[查看全文]
-
伺服电机维修案例之050 CLALM报警(组:i 轴:j)
2018-03-26 伺服电机维修
一、案例情形: SRVO - 050 CLALM alarm (Group:i Axis:j) [现象] 在伺服放大器内部推测的扰动扭矩变得异常大。 检测出刀具冲突。) 二、解决方法: [对策1] 确认机器人是否冲突,或者确认是否存在导致该轴的机械性负载增大的原因。 [对策2] 确认负载 ...[查看全文]
-
 发那科自动码垛机器人
2018-02-12 发那科机器人维修
发那科自动码垛机器人
2018-02-12 发那科机器人维修以信息技术(IT)和运营技术(OT)结合为核心的工业4.0时代已经到来,中国发布了中国制造2025战略,推动传统工厂向智能制造转型升级并触发了巨大的市场机遇.在此背景下,为打通智能制造产业上下游产业链,加快工业自动化、机器人产品与市场的对接,由OFweek中国高科技 ...[查看全文]
-
 FANUC机械手电路板维修之电阻法测试
2018-02-12 电路板维修
FANUC机械手电路板维修之电阻法测试
2018-02-12 电路板维修电阻法 电阻是各种电子元器件和电路的基本特征,利用万用表测量电子元器件或Fanuc机器人电路各点之间电阻值来判断故障的方法称为电阻法。 测量电阻值,有 在线和离线 两种基本方式。 在线测量,需要考虑被测元器件受其他并联支路的影响,测量结果应对照原理 ...[查看全文]
-
 FANUC发那科机械手臂示教器维修
2018-02-12 示教器维修
FANUC发那科机械手臂示教器维修
2018-02-12 示教器维修FANUC机械手控制系统故障示例分析 例1 FanucF-200iB七轴点焊机械手控制器断电检修后,对控制器送电,机械手报伺服故障,故障代码为SERVO-062。对此故障代码进行复位:按MENUSSYSTEMF1,[TYPE]找master/calF3,RES_PCAF4,YES后,机械手仍然报伺服故障。 故障 ...[查看全文]
-
 数字式交流伺服驱动单元的故障检测与维修
2018-02-12 伺服电机维修
数字式交流伺服驱动单元的故障检测与维修
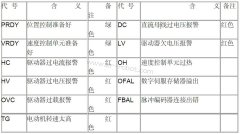
2018-02-12 伺服电机维修数字式交流伺服驱动单元的故障检测与维修 驱动器上的状态指示灯报警 FANUC S系列数字式交流伺服驱动器,设有11个状态及报警指示灯,指示灯的状态以及含义见表5-8 。 以上状态指示灯中, HC、HV、OVC、TG、DC、LV的含义与模拟式交流速度控制单元相同,主回路 ...[查看全文]
-
 FANUC发那科伺服电机维修故障问题
2018-02-12 伺服电机维修
FANUC发那科伺服电机维修故障问题
2018-02-12 伺服电机维修FANUC发那科伺服电机维修故障包括:不能启动、启动无力、运行抖动、编码器报警、编码器磨损、编码器损坏、失磁、过电流、过载、跑位、输出不平衡、位置不准 一通电就报警 一通电就跳闸 磁铁爆钢卡死转不动 电机发热发烫维修 电机运转异常维修等 FANUC发那科 ...[查看全文]
-
发那科机械手伺服电机编码器故障原因2018-02-12 伺服电机维修
发那科码垛机器人伺服电机编码器故障 发那科码垛机器人伺服电机编码器故障原因 1、发那科码垛机器人电机拆装不规范(敲击电机轴) 2、发那科码垛机器人电机轴在运行中受到强烈冲撞引起。 3、发那科码垛机器人电机轴在运行中因越位撞到机械限位引起。 发那科 ...[查看全文]
-
发那科伺服电机轴承过热原因2018-02-12 伺服电机维修
发那科焊接机器人伺服电机维修:轴承过热 发那科焊接机器人伺服电机维修:轴承过热原因以及排查 1、发那科机器人伺服电机维修:轴承过热故障原因 ①滑脂过多或过少; ②油质不好含有杂质; ③轴承与轴颈或端盖配合不当(过松或过紧); ④轴承内孔偏心,与轴 ...[查看全文]
-
发那科焊接机器人伺服电机维修2018-02-12 伺服电机维修
发那科焊接机器人伺服电机维修 发那科焊接机器人伺服电机维修是一门复杂的技术服务行业。最近几年,发那科焊接机器人伺服电机使用越来越广泛,发那科焊接机器人伺服电机维修这种技术服务需求也越来越迫切。由于国内使用的发那科焊接机器人大都是进口产品,其 ...[查看全文]


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7