您现在的位置是:
-
 什么是发那科机器人坐标系
2019-07-26 焊接机器人保养
什么是发那科机器人坐标系
2019-07-26 焊接机器人保养坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。坐标系有关节坐标系、 关节坐标系关节坐标系是设定在机器人的关节中的坐标系。关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。 下图中的关节坐 ...[查看全文]
-
 FANUC发那科机器人工具坐标系的设置与使用三点示教法
2019-07-13 搬运机器人保养
FANUC发那科机器人工具坐标系的设置与使用三点示教法
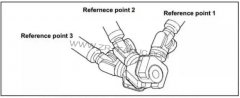
2019-07-13 搬运机器人保养三点示教法( TCP自动设定 ) 设定工具中心点(工具坐标系的x、y、z)。进行示教,使参考点1、2、3以不同的姿势指向一点。由此自动计算TCP的位置。要进行正确的设定,应尽量使三个趋近方向各不相同。 具体步骤: 1. 按下 [MENU] (菜单)键,显示出画面菜单 ...[查看全文]
-
 双目视觉摄像机的参数标定参考坐标系介绍
2019-10-11 发那科资讯
双目视觉摄像机的参数标定参考坐标系介绍
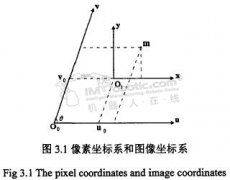
2019-10-11 发那科资讯双目视觉摄像机的参数标定参考坐标系介绍 焊接机器人视觉的基本任务就是从双目摄像机获得的二维图像中恢复物体的三维空间信息,从而能够识别目标物体,进行生产作业。空间中物体与其在成像平面形成的二维图像的相互关系由摄像机的内外参数决定,内部参数是 ...[查看全文]
共1页/3条
相关搜索

Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7