您现在的位置是:
-
发那科机器人三点法TCP校准2019-12-06 维修案例
FANUC机器人TCP校准 缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(ToolCenterPoint)。 工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储 ...[查看全文]
-
 FANUC发那科机器人工具坐标系的设置与使用三点示教法
2019-07-13 搬运机器人保养
FANUC发那科机器人工具坐标系的设置与使用三点示教法
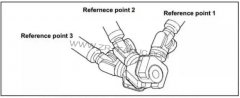
2019-07-13 搬运机器人保养三点示教法( TCP自动设定 ) 设定工具中心点(工具坐标系的x、y、z)。进行示教,使参考点1、2、3以不同的姿势指向一点。由此自动计算TCP的位置。要进行正确的设定,应尽量使三个趋近方向各不相同。 具体步骤: 1. 按下 [MENU] (菜单)键,显示出画面菜单 ...[查看全文]
共1页/2条
相关搜索

Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7