ФњЯждкЕФЮЛжУЪЧЃКЪзвГ > ЗЂФЧПЦЛњЦїШЫЮЌао > ЪОНЬЦїЮЌао > >FANUCЙЄвЕЛњЦїШЫЪОНЬЦїЕФЪЕМЪВйзїСїГЬКЭвЩЕуФбЕу
FANUCЙЄвЕЛњЦїШЫЪОНЬЦїЕФЪЕМЪВйзїСїГЬКЭвЩЕуФбЕу
ЪБМфЃК2018-05-08 РДдДЃКЛЅСЊЭј дФЖСДЮЪ§ЃК
ЁЁЁЁБОЮФжївЊНщЩмСЫЗЂФЧПЦЛњЦїШЫдкЪОНЬЦїжкЕФзјБъЯЕЃЌдкЪОНЬЦїЩЯШчКЮЪЕЯжЕуЖЏЛњЦїШЫВйзїЃЌвдМАЙЄвЕЛњЦїШЫЮЛжУзДЬЌгІИУШчКЮЯдЪОЁЃ
ЁЁЁЁвЛЁЂЪОНЬЦїЕФзјБъЯЕЯъНт
ЁЁЁЁдкЪОНЬЦїжаЃЌЕуЛїCOORDЃЌПЩбЁЕФзјБъЯЕгаЃК
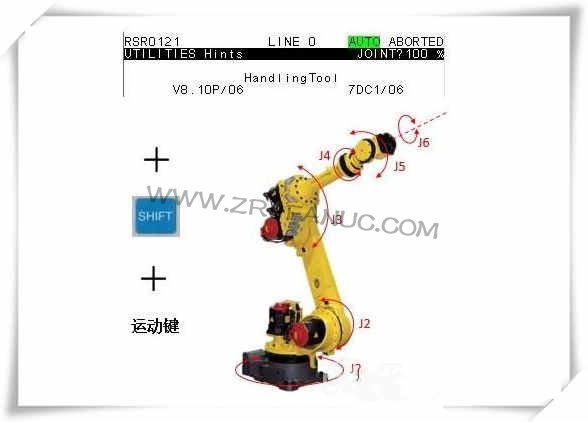
ЃЈ1ЃЉJOINTЃЈЙиНкзјБъЃЉ
ЃЈ2ЃЉWORLDЃЈШЋОжзјБъЃЉЃК

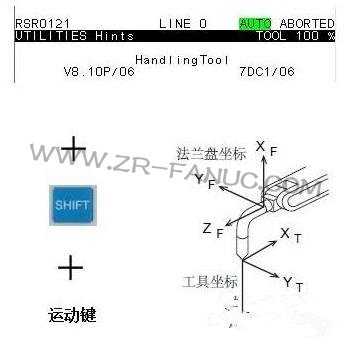
ЃЈ3ЃЉTOOLЃЈЙЄОпзјБъЃЉ
ЃЈ4ЃЉUSERЃЈЙЄзїзјБъЃЉ

ЁОзЂвтЁП
ЁЁЁЁJOINTЃЈЙиНкзјБъЃЉПЩЪЙЙЄвЕЛњЦїШЫНјаажсзјБъдЫааЃЌПЩЗжБ№ЖдJ1ЃЌJ2ЃЌJ3ЃЌJ4ЃЌJ5ЃЌJ6Нјааа§зЊЁЃ
ЁЁЁЁJGFRMЃЈЪжЖЏзјБъЃЉЁЂWORLDЃЈШЋОжзјБъЃЉЁЂUSERЃЈЙЄзїзјБъЃЉЃЌдкгУЛЇздЖЈвхзјБъЯЕЧАЃЌетШ§жжзјБъЮЛжУгыЗНЯђЭъШЋжиКЯЁЃ
ЁЁЁЁTOOLЃЈЙЄОпзјБъЃЉЮЊЙЄвЕЛњЦїШЫЙЄОпзјБъЯЕЁЃ
ЁЁЁЁЖўЁЂШчКЮдкЪОНЬЦїжкЕуЖЏЛњЦїШЫЕФЬѕМўЃК
ЁЁЁЁЃЈ1ЃЉЪОНЬЦїMODE SWITCHФЃЪНПЊЙиЮЊЃКT1ЃЏT2ЁЃ
ЁЁЁЁЃЈ2ЃЉЪОНЬЦїONЃЏOFFПЊЙиЮЊЃКONЁЃ
ЁЁЁЁЃЈ3ЃЉдкЪОНЬЦїжабЁдёЫљашвЊЕФзјБъЁЃ
ЁЁЁЁЃЈ4ЃЉАДзЁЪОНЬЦїЁОDEAD MANЁПЃЈШЮвтвЛИіЃЉЁЃ
ЁЁЁЁЃЈ5ЃЉАДзЁЪОНЬЦїЁОSHIFTЁПЃЈШЮвтвЛИіЃЉЁЃ
ЁЁЁЁвдЩЯЬѕМўЖМТњзуЕФЧщПіЯТЃЌАДзЁШЮвтвЛИідЫЖЏМќЃЌОЭПЩвдЕуЖЏЙЄвЕЛњЦїШЫСЫЁЃ
ЁЁЁЁ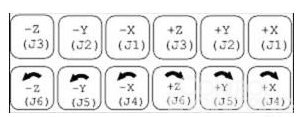
ЁЁЁЁШ§ЁЂЦСФЛЩЯЕФЮЛжУзДЬЌНтЖС
ЁЁЁЁPOSITION ЦСФЛвдЙиНкНЧЖШЛђжБНЧзјБъЯЕЯдЪОЮЛжУаХЯЂЁЃЫцзХЛњЦїШЫЕФдЫЖЏЃЌЦСФЛЩЯЕФЮЛжУаХЯЂВЛЖЯЕиЖЏЬЌИќаТЁЃЦСФЛЩЯЕФЮЛжУаХЯЂжЛЪЧгУРДЯдЪОЕФЃЌВЛФмаоИФЁЃ
- FANUCЗЂФЧПЦЛњЦїШЫЪОНЬЦїГЃМћЙЪеЯМАЮЌаоЗНЗЈ(2026-01-05)
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїПижЦУцАхЦЦЫщЮЌао(2025-12-24)
- FANUCЗЂФЧПЦЛњЦїШЫЪОНЬЦїКкЦСЙЪеЯЮЌао(2025-12-09)
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЮоЗЈНјШыЯЕЭГЮЌао(2025-12-01)
- FANUCЗЂФЧПЦЛњЦїШЫЪОНЬЦїЩСЦСЮЌао(2025-11-17)
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2256-C100АзЦСЮЌао(2025-11-10)
- ЗЂФЧПЦFANUCЛњЦїШЫA05B-2301-C335ЪОНЬЦїЮЌао
- ЗЂФЧПЦАсдЫЛњЦїШЫM-2000iAЮоЗЈПижЦВйзїЃЈОЏБЈ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2255-C101НєМБМБЭЃЙЪ
- ЗЂФЧПЦКИНгЛњЦїШЫЩаЮДСЌНсКИЧЙЪБжДааСЫСЌНсжИ
- ЗЂФЧПЦКИНгЛњЦїШЫдкгІгУжаГЃМћЕФЙЪеЯМАНтОіДы
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїУцАхНєМБЭЃЛњЃЈОЏБЈ001ЃЉ
- ЗЂФЧПЦЛњЦїШЫПижЦУцАхЕчТЗАхЮоСЌНгаХКХЃЈОЏБЈ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЦСФЛЪЇСщДЅУўЮоЗДгІШчКЮНт
- зюаТЗЂФЧПЦЛњЦїШЫJ2жсМѕЫйЦїИќЛЛСїГЬЁОЭМЮФЯъ
- ЫХЗўЕчЛњБЈОЏаХКХ046ЕФдвђМАНтОіЗНЗЈ

- FANUCЗЂФЧПЦЛњЦїШЫЮЛжУаХЯЂаоИФ
- ЗЂФЧПЦЛњЦїШЫУмТыЕФНтГ§ЗНЗЈ
- ЗЂФЧПЦFANUCЛњЦїШЫKARELГЬађЕФХф
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїе§ГЃШДЮоЗЈЦє
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЦСФЛЪЇСщДЅУў
- ЗЂФЧПЦFanucЛњЦїШЫжИСюБрМДѓШЋ
- FANUCЙЄвЕЛњЦїШЫЪОНЬЦїЕФЪЕМЪВй
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїРЖЦСЫРЛњШчКЮ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїУцАхНєМБЭЃЛњ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2255-C1
