发那科搬运机器人R-1000ia原点位置和可动范围设置错误解决方法
时间:2018-04-27 来源:互联网 阅读次数:
【机器人型号介绍】 FANUC R-1000ia:2011年新品机器人小型高速机器人, 紧凑的机器人结构和优越的动作性能最适合于采用密集型布局的搬运、点焊作业。 一、故障现象: 各控制轴上,分别设有原点和可动范围。控制轴到达可动范围的极限,叫做超程(OT)。各轴都在……
【机器人型号介绍】

FANUC R-1000ia:2011年新品机器人小型高速机器人, 紧凑的机器人结构和优越的动作性能最适合于采用密集型布局的搬运、点焊作业。
一、故障现象:
各控制轴上,分别设有原点和可动范围。控制轴到达可动范围的极限,叫做超程(OT)。各轴都在可动范围的两端进行超程检测。只要不是由于伺服系统的异常和系统出错而导致原点位置丢失,机器人都被控制为不超出可动范围地动作。 此外,为了进一步确保安全,还提供采用机械式制动器的可动范围限制和采用限位开关的可动范围限制。
二、解决方法:
J1轴的机械式制动器在结构上会因制动器的变形而机器人停止。务须更换已经变形的制动器。J1轴的机械式制动器,请参照图3.3 (b)和图6.2(b)进行更换。螺栓的拧紧力矩,请参照卷末的“螺栓强度和螺栓拧紧力矩一览”,以规定的力矩予以紧固。请勿进行机械式制动器的改造等。否则有可能导致机器人不能正常停止。
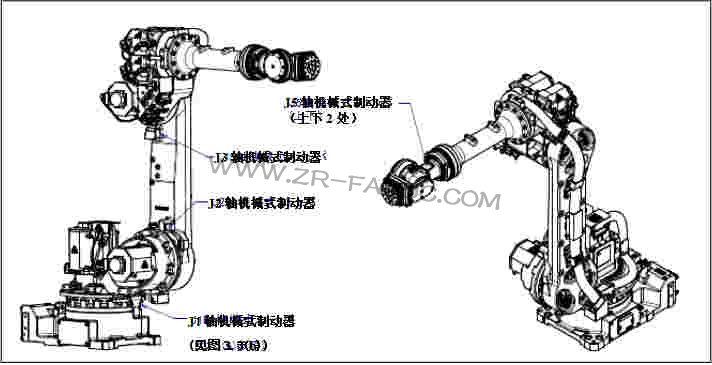
图中示出机械式制动器的位置
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
相关资讯
- 发那科搬运机械手保养秘籍(2025-07-22)
- 发那科M-1000iA机械手保养维护方法(2025-05-26)
- 法兰克搬运机械手保养_机器人注油维护(2024-08-19)
- 发那科R-2000iC搬运机器人保养要点(2024-05-27)
- FANUC发那科M-900iA搬运机器人维修保养经验总结(2024-04-10)
- FANUC发那科M-70iC搬运机器人维修保养攻略分享(2024-04-10)

声明:本站提及的品牌仅用于说明维修机型,本公司未获得品牌授权,非官方授权售后。子锐机器人是一家独立的第三方机器人技术服务商,为客户提供更高效率、更优成本、更全服务的选择。
