-
 FANUC发那科机器人主轴驱动器缺相维修
2025-11-20 驱动器维修
FANUC发那科机器人主轴驱动器缺相维修
2025-11-20 驱动器维修发那科机器人的主轴运行直接决定加工精度和效率,主轴驱动器作为动力调控核心,负责稳定输出三相电源驱动电机运转。缺相是驱动器常见故障之一,故障发生时主轴常表现出多种异常,比如启动时转速缓慢甚至无法启动,运行中出现明显抖动,加工面出现不规则纹路。 ...[查看全文]
-
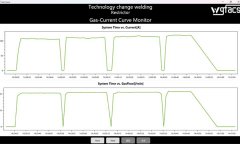
 发那科机器人焊接混合气如何节省
2025-11-19 发那科机器人维修
发那科机器人焊接混合气如何节省
2025-11-19 发那科机器人维修发那科机器人凭借精准的轨迹控制和稳定的焊接性能,在混合气保护焊场景中应用广泛。混合气的配比和供给状态直接影响焊缝成型和力学性能,而气体消耗成本在焊接工序中占比不小... ...[查看全文]
-
 发那科机器人二三轴减速机漏油维修
2025-11-19 发那科机器人维修
发那科机器人二三轴减速机漏油维修
2025-11-19 发那科机器人维修发那科机器人二三轴减速机漏油是高负载运行工况下较为常见的机械故障,尤其在汽车焊装、铸造搬运等连续作业场景中更为突出。第二轴与第三轴承担大臂及前臂的回转与俯仰运动,长期承受交变扭矩与重力载荷,其减速机壳体密封一旦失效,润滑油便会沿输出法兰、电 ...[查看全文]
-
 发那科机器人汽车零部件焊接节气
2025-11-18 发那科机器人维修
发那科机器人汽车零部件焊接节气
2025-11-18 发那科机器人维修发那科机器人在汽车零部件焊接产线中承担着高节拍、高重复性的自动化任务,涵盖副车架、控制臂、座椅骨架、排气系统支架等结构件的MIG或脉冲MIG焊接。此类工件多采用高强度钢、镀锌板或铝合金材料,焊缝密集、节拍紧凑,对保护气体的稳定性与经济性提出双重挑 ...[查看全文]
-
 发那科机器人氩弧焊节气装置
2025-11-18 发那科机器人维修
发那科机器人氩弧焊节气装置
2025-11-18 发那科机器人维修发那科机器人在氩弧焊领域的市场占有率居高不下,其精准的轨迹控制能力让它在精密零部件焊接中表现突出。氩弧焊作业里,氩气的保护效果直接关系焊缝质量,一旦保护不到位,焊缝就容易出现氧化、气孔等问题,后续返工不仅耗时还增加成本。 ...[查看全文]
-
 发那科机器人平衡缸断裂维修
2025-11-18 发那科机器人维修
发那科机器人平衡缸断裂维修
2025-11-18 发那科机器人维修发那科机器人在重型负载搬运、大臂长距离作业场景中,平衡缸承担着平衡机械臂重量的核心作用,能有效降低驱动电机负荷,提升运行稳定性。平衡缸断裂是此类机器人的严重故障,断裂瞬间会导致机械臂重心失衡,轻则引发运行卡顿、定位偏差,重则造成机械臂突然下 ...[查看全文]
-
 FANUC发那科机器人示教器闪屏维修
2025-11-17 示教器维修
FANUC发那科机器人示教器闪屏维修
2025-11-17 示教器维修发那科机器人示教器是程序编写、参数设定和手动操控的核心交互设备,屏幕显示的稳定性直接关系操作准确性。在生产线调试或批量作业中,示教器闪屏会导致参数看不清、程序编辑中断,严重时操作人员无法判断机器人运行状态,被迫暂停生产。 ...[查看全文]
-
 发那科焊接机器人压力容器焊接节气装置
2025-11-14 发那科机器人维修
发那科焊接机器人压力容器焊接节气装置
2025-11-14 发那科机器人维修压力容器作为承受一定压力的特种设备,焊缝的可靠性直接决定设备运行安全底线,在石油炼化、核电能源等关键领域,其焊缝必须具备抗高压冲击、防介质泄漏、耐长期腐蚀的综合性能。 ...[查看全文]
-
 FANUC发那科机器人本体线缆断裂维修
2025-11-14 发那科机器人维修
FANUC发那科机器人本体线缆断裂维修
2025-11-14 发那科机器人维修发那科机器人本体线缆是信号传输与动力供给的关键载体,集成了电机动力线、编码器信号线及传感器线缆等多种类型,分布在机器人各关节部位。线缆断裂是长期运行后易出现的故障,初期多表现为间歇性信号中断,机器人执行动作时出现卡顿或定位偏差,随着断裂加剧 ...[查看全文]
-
 发那科机器人二保焊省气设备
2025-11-13 发那科机器人维修
发那科机器人二保焊省气设备
2025-11-13 发那科机器人维修二保焊以其熔敷效率高、焊缝力学性能优异的特点,成为农机装备、集装箱制造等重工业领域的主流焊接工艺。发那科机器人凭借卓越的运动控制精度和抗干扰能力,在二保焊自动化生产线中占据重要地位,尤其擅长处理多焊缝、高精度要求的复杂工件焊接,通过预设程序 ...[查看全文]
-
 FANUC发那科机器人io板故障维修
2025-11-13 发那科机器人维修
FANUC发那科机器人io板故障维修
2025-11-13 发那科机器人维修FANUC发那科机器人I/O板作为控制系统与外部设备交互的桥梁,负责采集传感器信号、驱动电磁阀、继电器及安全装置。在长期运行中,因环境干扰、接线松动或元件老化,可能出现输入无响应、输出失效、通信中断或模块报错等现象。 ...[查看全文]
-
 发那科机器人悬架焊接节气装置
2025-11-12 发那科机器人维修
发那科机器人悬架焊接节气装置
2025-11-12 发那科机器人维修在商用车和工程机械生产车间,悬架焊接的质量直接决定装备的安全性能,一旦焊缝出现氧化、气孔等缺陷,可能导致重载时悬架断裂的严重后果。发那科机器人凭借精准的电弧控制和稳定的轨迹重复精度,成为悬架焊接的核心装备,尤其在多型号悬架混线生产中,能快速 ...[查看全文]
-
 FANUC发那科机器人伺服电机不转维修
2025-11-12 发那科机器人维修
FANUC发那科机器人伺服电机不转维修
2025-11-12 发那科机器人维修FANUC发那科机器人伺服电机不转是现场常见但成因复杂的故障现象。操作人员按下使能或执行程序时,对应关节无任何动作,示教器可能报“Servo Not Ready”、“Overload”或无报警仅显示位置未更新。 ...[查看全文]
-
 发那科机器人铝材焊接节气装置
2025-11-11 发那科机器人维修
发那科机器人铝材焊接节气装置
2025-11-11 发那科机器人维修发那科机器人凭借精准的轨迹控制和稳定的焊接性能,在铝材焊接领域占据重要地位。铝材导热性强、熔点低,焊接时易出现氧化、气孔等缺陷,对保护气的纯度和供给稳定性要求极高。 ...[查看全文]
-
 发那科机器人驱动器过热维修
2025-11-11 驱动器维修
发那科机器人驱动器过热维修
2025-11-11 驱动器维修发那科机器人在精密制造、自动化生产线中应用广泛,驱动器作为动力控制核心,负责调节电机运行参数并传递动力。驱动器出现过热故障时,通常会触发系统过热保护,导致机器人突然停机或降额运行,直接中断生产流程。 ...[查看全文]

