-
 干货系列-发那科FANUC机器人故障维修合集
2025-01-07 维修案例
干货系列-发那科FANUC机器人故障维修合集
2025-01-07 维修案例Q: FANUC系统有0M、0T、0MB、0MC、0MD、3M、6M、11M、15M、16M、18M、20M、21M,请问这些系统的区别是什么? A: 从旧到新 3 6 11 0 15 16 18 21 同样为0系统,0MB为老的型号,可能使用直流或S系列交流电机T和M区别是用于车床还是铣床。目前FANUC的主要产品为 ...[查看全文]
-
 IGM机器人K6示教器无法连接故障维修
2021-06-02 维修案例
IGM机器人K6示教器无法连接故障维修
2021-06-02 维修案例IGM机器人K6示教器维修 广州子锐机器人技术有限公司掌握了进口品牌机器人示教器的维修技术要领,IGM示教器维修速度快,IGM机器人维修技术高,保证100%修复。此外我们还包括维修IGM机器人主板,IGM机器人示教器维修、IGM机器人驱动器维修,igm机器人伺服电机 ...[查看全文]
-
 氩气保护焊机气体流量控制有哪些方法
2020-09-28 维修案例
氩气保护焊机气体流量控制有哪些方法
2020-09-28 维修案例节气装置焊接机器人节气设备 混合气节气 二八气体流量控制 气体流量控制 节气管家 气体流量自动控制系统 GFC-R01-N03节气装置将焊接气体费用减半! ZR-YP011节气装置通过以下方法,为您减少焊接气体的用量。在整个焊接过程中,气流与焊接电流自动同步调节。 较大 ...[查看全文]
-
 无示教器操作方法,发那科FANUC机器人无示教器操作功能
2020-06-12 维修案例
无示教器操作方法,发那科FANUC机器人无示教器操作功能
2020-06-12 维修案例一般来说,操作FANUC机器人时,需要使用FANUC示教器iPendant来对机器人进行示教、做信号配置等。对于熟练使用示教器的用户来说,示教器就是他们控制机器人的工具。没有示教器,还能控制机器人吗?答案是肯定的。 Jogging iPendant(JITP) Jogging iPendant ...[查看全文]
-
 发那科FANUC机器人维修保养故障简析
2020-03-25 维修案例
发那科FANUC机器人维修保养故障简析
2020-03-25 维修案例安全操作规程 1.示教和手动机器人 1)请不要带者手套操作示教盘和操作盘。 2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 4)要预先考虑好避让机器人的运动轨迹,并确认该 ...[查看全文]
-
 发那科FANUC机器人本体电缆更换详细流程
2019-12-31 维修案例
发那科FANUC机器人本体电缆更换详细流程
2019-12-31 维修案例对R-2000i机器人进行更换本体电缆操作,该型号的本体电缆分为动力电缆和编码器电缆,更换的方法类似。 使用工具清单: 内六角扳手一套、斜口钳、十字螺丝刀,一字螺丝刀、鱼嘴钳、退针器、尼龙扎带若干。 作业中安全用品一览: 安全帽、安全挂锁、手套、安全 ...[查看全文]
-
 发那科FANUC机器人内部线缆更换(安装部分)
2019-12-28 维修案例
发那科FANUC机器人内部线缆更换(安装部分)
2019-12-28 维修案例通过拆解,准备更换新的线缆,进行安装。 1、在装线缆之前,先在电缆有标记的位置进行安装和固定,包括一些尼龙保护带,电缆保护套等。 2、从2轴臂侧边插入电缆,同时引到1轴底座侧。 3、把2轴臂盖安装后再将3轴外套部穿入电缆。 4、在3轴外套部分线板上 ...[查看全文]
-
 发那科FANUC机器人抓取程序案例
2019-12-27 维修案例
发那科FANUC机器人抓取程序案例
2019-12-27 维修案例1:TIMER[1]=RESET 2:TIMER[1]=START 3:UTOOL_NUM=1 [工具坐标系1] 4:UFRAME_NUM=1 [用户坐标系1] 5:OVERRIDE=50% [速度50%] 6:D0[101]=OFF [机器人抓手关闭状态] 7:WAIT DI[105]=ON [回原点信号] 8:WAIT DI[101]=ON [机器人抓手原位磁性开关] 9:J P[1] 50% F ...[查看全文]
-
 发那科FANUC发生报警MOTN-023或者MOTN-063奇异点的解决方法
2019-12-24 维修案例
发那科FANUC发生报警MOTN-023或者MOTN-063奇异点的解决方法
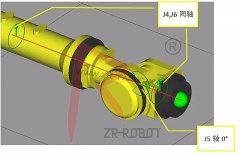
2019-12-24 维修案例在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。 图1机器人奇异点位置 当机器人J5轴处于0位置,机器人会出现MOTN-023报警: 图2MOT ...[查看全文]
-
 发那科FANUC机器人程序加注解全流程
2019-12-19 维修案例
发那科FANUC机器人程序加注解全流程
2019-12-19 维修案例1.先点击MENU-设置-其它 2.点击Remark键 3.显示界面如下图所示 4.按ENTER键 5.输入注解内容 最后,完美完成! ...[查看全文]
-
 FANUC发那科弧焊机器人常见故障怎么处理
2019-12-18 维修案例
FANUC发那科弧焊机器人常见故障怎么处理
2019-12-18 维修案例自动弧焊机器人工作站一般由弧焊机器人及控制器、外围操作机连锁机构和焊接电源组成,在设备故障排除时可以根据故障代码并结合各模块进行设备维修。 1.弧焊机器人运动部位故障 弧焊机器人运动部位故障,该故障一般报警代码前缀为SRVO,出现该故障报警时需要 ...[查看全文]
-
 川崎机器人故障报警代码维修排除方法
2019-12-13 维修案例
川崎机器人故障报警代码维修排除方法
2019-12-13 维修案例川崎机器人故障排除参考方法 首先,第一时间做好系统数据备份工作。了解故障现象,通过现场一些设备的基本现象和现场技术人员的描述进行判断,会比较有效率,。 例如,根据一位现场工程师的描述川崎控制器偶发会产生自动重启现象,这个重启过程中会看到快要 ...[查看全文]
-
 脉冲编码器数据丢失报警SRVO-062解除方法FANUC机器人故障维修
2019-12-12 维修案例
脉冲编码器数据丢失报警SRVO-062解除方法FANUC机器人故障维修
2019-12-12 维修案例如何消除SRVO-062 SRVO062SVAL2BZALalarm(Group:iAxis:j)为脉冲编码器数据丢失报警。 故障解除步骤如下: 1、首先检查下机器人电池是否电量不足。 2、依次按下MENU0(下一页,选择SYSTEMMaster/cal.(如上图) 3、如果没有Master/cal选项更改变量$MASTER ...[查看全文]
-
 FANUC发那科机器人伺服放大器LED故障诊断维修案例
2019-12-10 维修案例
FANUC发那科机器人伺服放大器LED故障诊断维修案例
2019-12-10 维修案例FANUC机器人控制柜上伺服放大器上有很多的LED显示灯,这个主要是用来进行故障排查所用。在示教器系统产生报警时,可以进一步判断故障真因。 1、通过LED的显示精确判断故障状态。下图为我们打开R-30IB控制柜后,会看到内部硬件结构的一个布局。 下图红色部分 ...[查看全文]
-
发那科机器人三点法TCP校准2019-12-06 维修案例
FANUC机器人TCP校准 缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(ToolCenterPoint)。 工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储 ...[查看全文]

