ЕкШ§ЗНЛњЦїШЫЮЌаоММЪѕЗўЮёЩЬ
ШШУХЙиМќДЪЃК
ЁЁfanuc ЁЁЗЂФЧПЦ ЁЁЮЌао ЁЁЛњаЕЪж ЁЁЫХЗўЕчЛњ ЁЁЪОНЬЦїЮЌао ЁЁМѕЫйЦїЮЌао ЁЁЪОНЬЦї ЁЁЛњЦїШЫ ЁЁЯЕЭГ ЁЁМѕЫйЦїЮЌао ЁЁМѕЫйЦї ЁЁПижЦЙё ЁЁЗЂФЧПЦЕчЛњ ЁЁЫХЗўЗХДѓЦї ЁЁ
ФњЯждкЕФЮЛжУЪЧЃКЪзвГ > ЗЂФЧПЦЛњЦїШЫЮЌао > ЪОНЬЦїЮЌао > >FANUCЗЂФЧПЦЛњЦїШЫБЈОЏЯћГ§
FANUCЗЂФЧПЦЛњЦїШЫБЈОЏЯћГ§
ЪБМфЃК2020-03-26 РДдДЃКЛЅСЊЭј дФЖСДЮЪ§ЃК
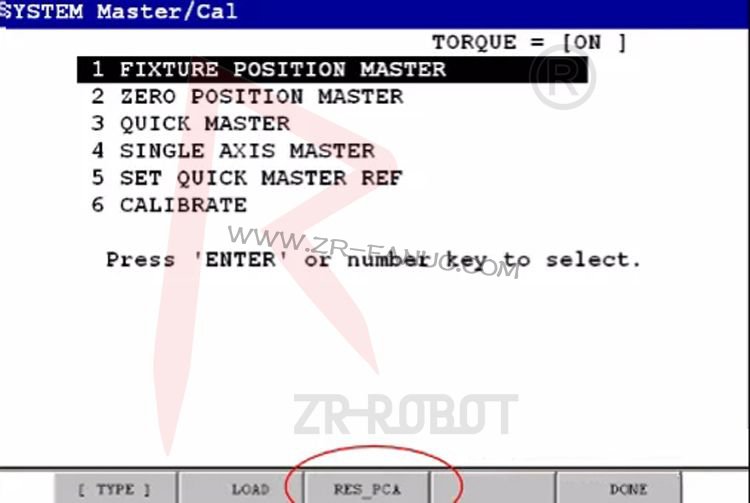
вЛ.ШчКЮЯћГ§SRVO-062 SRVO062SVAL2BZALalarmЃЈGroupЃКiAxisЃКjЃЉЮЊТіГхБрТыЦїЪ§ОнЖЊЪЇБЈОЏ НтОіЗНЗЈЃК 1ЁЂЪзЯШМьВщЯТЛњЦїШЫЕчГиЪЧЗёЕчСПВЛзу 2ЁЂвРДЮАДЯТMENU0ЃЈЯТвЛвГЃЌбЁдёSYSTEMMaster/cal. 3ЁЂШчЙћУЛгаMaster/calбЁЯюИќИФБфСП$MASTER_ENB 4ЁЂАДЯТF3ЃЈRESЁЁ
вЛ.ШчКЮЯћГ§SRVO-062
SRVO—062SVAL2BZALalarmЃЈGroupЃКiAxisЃКjЃЉЮЊТіГхБрТыЦїЪ§ОнЖЊЪЇБЈОЏ
НтОіЗНЗЈЃК
1ЁЂЪзЯШМьВщЯТЛњЦїШЫЕчГиЪЧЗёЕчСПВЛзу
2ЁЂвРДЮАДЯТMENU—0ЃЈЯТвЛвГЃЌбЁдёSYSTEM—Master/cal.
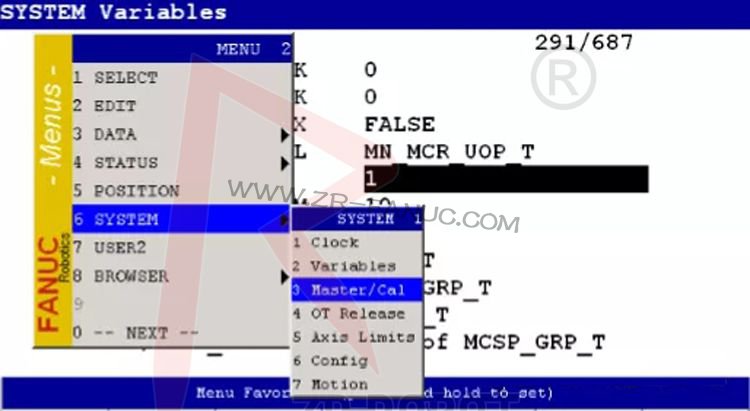
3ЁЂШчЙћУЛгаMaster/calбЁЯюИќИФБфСП$MASTER_ENB

4ЁЂАДЯТF3ЃЈRES_PCAЃЉЃЌбЁдёYESЁЃ
Жў.ШчКЮЯћГ§SRVO-075БЈОЏ
SRVO-075WARNPulsenotestablishedЃЈGroupЃКiAxisЃКjЃЉТіГхБрТыЦїЮоЗЈМЦЪ§БЈОЏ
1.ПЊЛњЃЈГіЯжSRVO—075БЈОЏЃЉЃЛ
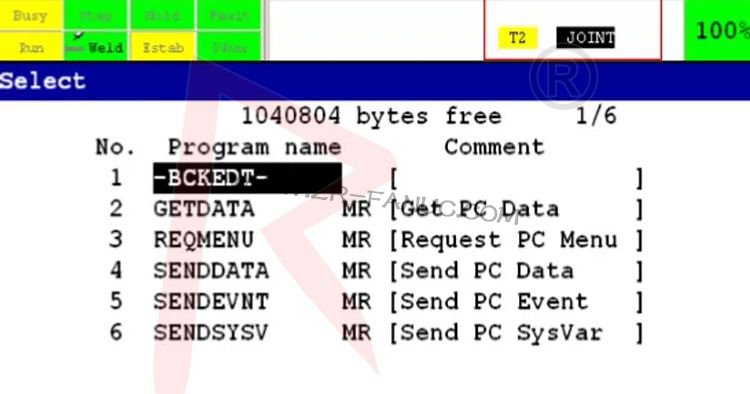
2.АДCOORDМќНЋзјБъЯЕЧаЛЛJOINTзјБъ
3.ЪЙгУTPЕуЖЏЛњЦїШЫБЈОЏжс20ЖШзѓгвЃЈSHIFT+дЫЖЏМќЃЉЃЛ
4.АДRESETЃЌЯћГ§SRVO—075БЈОЏЁЃ
ШчКЮЯћГ§SRVO-038БЈОЏ
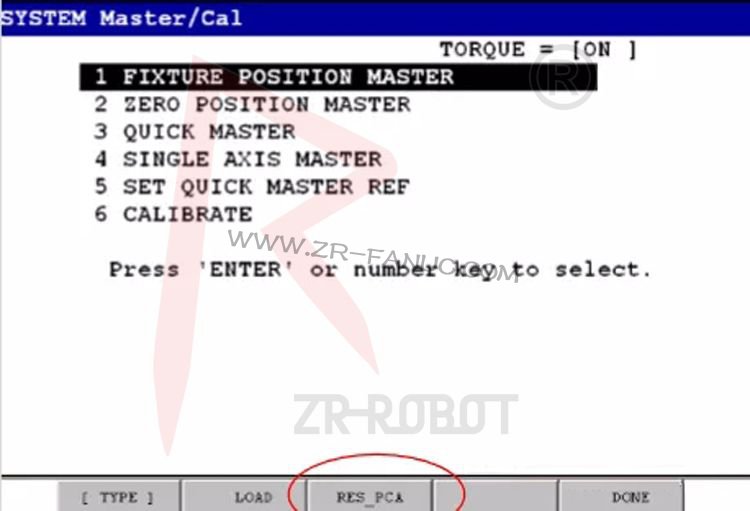
Ш§.ШчКЮЯћГ§SRVO-038БЈОЏ
АДЯТMENU—0ЃЈЯТвЛвГЃЉЃЛ
бЁдёSYSTEM—Master/calЃЛ
АДЯТRES_PCAЃЌбЁдёYESЁЃИДЮЛТіГхЃЛ
ЫФ.БЈОЏSRVO-023ЪБЃЌПЩФмЕФЧщПіЃЛ
ЕБЕчЛњЭЃжЙЪБЃЌВњЩњвЛИіЙ§ЖШЕФЫХЗўЮЛжУДэЮѓЁЃ
ЛњЦїШЫдкЙЬЖЈЮЛжУЪБЃЌЪмЭтСІЛђЦфЫћгІСІзїгУЕМжТЮЛжУБфЛЏЃЌПЩЙлВьЪЧЗёФГИіжсЃЌЕчЛњЩВГЕЪЇаЇЃЌБЇеЂЪЇАмЫљжТЃЌИќЛЛЙЪеЯЕчЛњМДПЩЁЃ
Утд№ЩљУїЃКБОЭјВПЗжЮФеТКЭаХЯЂРДдДгкЛЅСЊЭјЃЌБОЭјзЊдиГігкДЋЕнИќЖраХЯЂКЭбЇЯАжЎФПЕФЁЃШчзЊдиИхЩцМААцШЈЕШЮЪЬтЃЌЧыСЂМДСЊЯЕЭјеОЫљгаШЫЃЌЮвУЧЛсгшвдИќИФЛђЩОГ§ЯрЙиЮФеТЃЌБЃжЄФњЕФШЈРћЁЃ
ЯрЙизЪбЖ
- FANUCЗЂФЧПЦЛњЦїШЫЪОНЬЦїГЃМћЙЪеЯМАЮЌаоЗНЗЈ(2026-01-05)
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїПижЦУцАхЦЦЫщЮЌао(2025-12-24)
- FANUCЗЂФЧПЦЛњЦїШЫЪОНЬЦїКкЦСЙЪеЯЮЌао(2025-12-09)
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЮоЗЈНјШыЯЕЭГЮЌао(2025-12-01)
- FANUCЗЂФЧПЦЛњЦїШЫЪОНЬЦїЩСЦСЮЌао(2025-11-17)
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2256-C100АзЦСЮЌао(2025-11-10)
ЭЦМіФкШн
- ЗЂФЧПЦFANUCЛњЦїШЫA05B-2301-C335ЪОНЬЦїЮЌао
- ЗЂФЧПЦАсдЫЛњЦїШЫM-2000iAЮоЗЈПижЦВйзїЃЈОЏБЈ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2255-C101НєМБМБЭЃЙЪ
- ЗЂФЧПЦКИНгЛњЦїШЫЩаЮДСЌНсКИЧЙЪБжДааСЫСЌНсжИ
- ЗЂФЧПЦКИНгЛњЦїШЫдкгІгУжаГЃМћЕФЙЪеЯМАНтОіДы
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїУцАхНєМБЭЃЛњЃЈОЏБЈ001ЃЉ
- ЗЂФЧПЦЛњЦїШЫПижЦУцАхЕчТЗАхЮоСЌНгаХКХЃЈОЏБЈ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЦСФЛЪЇСщДЅУўЮоЗДгІШчКЮНт
- зюаТЗЂФЧПЦЛњЦїШЫJ2жсМѕЫйЦїИќЛЛСїГЬЁОЭМЮФЯъ
- ЫХЗўЕчЛњБЈОЏаХКХ046ЕФдвђМАНтОіЗНЗЈ
ШШЕуФкШн

- FANUCЗЂФЧПЦЛњЦїШЫЮЛжУаХЯЂаоИФ
- ЗЂФЧПЦЛњЦїШЫУмТыЕФНтГ§ЗНЗЈ
- ЗЂФЧПЦFANUCЛњЦїШЫKARELГЬађЕФХф
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїе§ГЃШДЮоЗЈЦє
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЦСФЛЪЇСщДЅУў
- ЗЂФЧПЦFanucЛњЦїШЫжИСюБрМДѓШЋ
- FANUCЙЄвЕЛњЦїШЫЪОНЬЦїЕФЪЕМЪВй
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїРЖЦСЫРЛњШчКЮ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїУцАхНєМБЭЃЛњ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2255-C1
ЩљУїЃКБОеОЬсМАЕФЦЗХЦНігУгкЫЕУїЮЌаоЛњаЭЃЌБОЙЋЫОЮДЛёЕУЦЗХЦЪкШЈЃЌЗЧЙйЗНЪкШЈЪлКѓЁЃзгШёЛњЦїШЫЪЧвЛМвЖРСЂЕФЕкШ§ЗНЛњЦїШЫММЪѕЗўЮёЩЬЃЌЮЊПЭЛЇЬсЙЉИќИпаЇТЪЁЂИќгХГЩБОЁЂИќШЋЗўЮёЕФбЁдёЁЃ
Copyright © ЙужнзгШёЛњЦїШЫММЪѕгаЯоЙЋЫОАцШЈЫљга ЕчЛАЃК15889988091 ЕижЗЃКЙужнЪаЗЌиЎЧјЖЋЛЗНжН№ЩНЙШДДвтАЫНж1КХ109 ICPЃКдСICPБИ15095857КХ-7
