机器人皮肤再获进展,鲍哲南团队研发“电子手套”让机器获得触觉
时间:2020-09-14 来源:互联网 阅读次数:
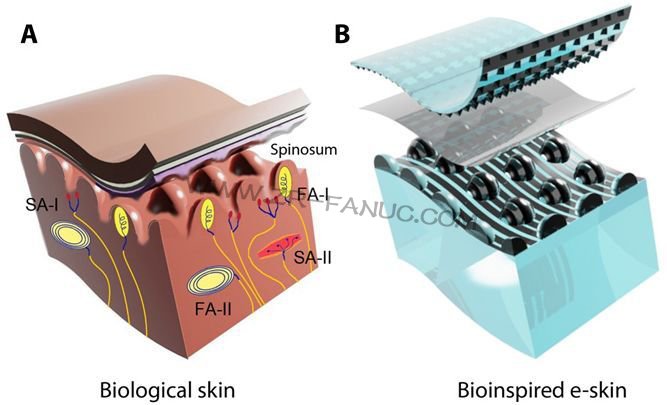
(图片来源:Science Robotics)
为了做到让电子手套实现部分与人手类似的感受能力,该团队在电子手套在设计上也参照了人手的工作原理。
与此同时,外界压力作用下,对棘层突起产生不同方向的刺激也能让皮肤感受到外力的方向。比如我们用两只手指夹起一个物体,我们能清楚的感受到一个向下的力。
不过,目前电子皮肤在工业场景中倒是已有小量的落地应用,那就是为工业机器人打造的安全皮肤。例如,伺服电机维修,从台湾工研院独立出来的初创公司原见精机,专门锁定工业机器人皮肤,通过自研的表面传感器让外观看似塑胶的材质具备触觉。
近几年在材料科学、软硬件的推陈出新下,机器人领域也有了一些突破,例如波士顿动力、Shadow Robot 在足部跟手部的创新,或是让机器听懂人话、懂得辨识物体,虽然让机器有触觉,现在听起来虽还像是科幻电影中的事,一旦触觉领域能取得更多突破,包括技术、量产、成本面,将让机器人走进另一个层次。
(来源:斯坦福官网)
约翰霍普金斯大学(Johns Hopkins University)的研究团队在今年 8 月利用嵌入导体的织物和橡胶制作可任意伸缩的电子皮肤,将其套上义肢,外部受到压力时,皮肤就会向截肢处的现有神经发送电脉冲,再而传达到大脑,形成触觉。
最近,斯坦福大学华裔化学家鲍哲南教授和她的团队研发了一个具有触觉传感器的手套,机械手臂在带上手套后能够具备部分和人类皮肤类似的触觉能力。
鲍哲南及团队最新研究
另外,英国苏格兰格拉斯哥大学(University of Glasgow)的研究人员在去年 3 月设计出一种基于石墨烯的软性电容式触控传感器,兼具触控及压力感测功能,触觉感应层可堆叠在刚性或软性的太阳能(PV)电池上,在操作时自动供电。

电子皮肤是将来电子工业发展的方向和趋势,学术界的研究也实现了进展,但不可讳言,一些创新想法及技术所面临的挑战往往是技术太困难,生产良率低,工业机器人维修,尚未进入大规模量产,否则就是尽管能够量产,但产品成本太昂贵。因此,想要实现在民用级产品中、商业化应用可能还需要时间,如果是医疗领域,还需要取得医疗监管机构的认证,时间可能会更久。
安全皮肤落地工业环境,为工业机器手臂点穴
参考:
图丨鲍哲南 (来源:斯坦福大学)
而位于中间层的绝缘层则将上下两层的带电层分开。这一层也至关重要,上下两层带电层在保持靠近、但未接触的情况下可以对电能进行储存。因此当有压力作用到手套上时,顶层和底层在压力的作用下,互相的距离会被缩短,此时储存的电能就会增加,以此感受到压力。同时与皮肤棘层一样,不平整的底层则会将压力的强度和具体方向反映到网格上,以此达到像人类的皮肤一样能够感受到压力的强度和方向。
对于这项技术的未来设想,鲍哲南表示这项技术还能运用到机器人辅助手术中,她认为在手术场景下,对触觉的精准控制是非常重要的。

在该团队进行的一项试验中,机械手在戴上电子手套后,轻轻触摸一枚莓果并立即收手,莓果在被触碰之后依然保持完好无损的状态。在另一个试验中,机器手还能在感受到手表面的切向力,同时作出应对,实现了用机器手抓住一个乒乓球,在保证其不掉落和不会被捏碎的前提下将乒乓球进行上下和左右移动。
如果我们对于机器人的终极目标是希望它就像人类一样耳聪目明又灵活的话,感官是不可缺少的关键,通过摄像头赋予机器视觉、利用传感器建立听觉之外,发那科机器人维修,现在世界许多科学家正在努力建立机器人的触觉,像是重量级科学家、斯坦福大学教授鲍哲南,子锐机器人维修,在柔性电子、电子皮肤领域开创出许多新技术,最新的进展是她及研究团队研发出一种电子手套,可以为机器人的手增加灵巧性,例如当机器人的手触摸到莓果时会自动停下来,或是当机器人手施力拿取、移动乒乓球时保持适当的力道而不会将其压扁,让机器人的触觉往更近似人类的方向前进,该研究论文已发表在 Science Robotics 上。
早在 1970 年代科学家就着手研究电子皮肤,现在全球投入该领域的科研单位也很多,为什么这是个重要的议题,因为可应用的领域很广,包括医疗健康领域的假肢、复健机器人、外骨骼机器人、消费电子的穿戴式装置、工业机器人与人类协同工作时的安全防护、特殊领域的性爱机器人等,还有更多现在不存在的科幻应用都可能实现,市场商机潜力庞大。
在电子手套上,每一处传感器都有三个柔性层组成。其中顶层和底层是具有电活性的,研究人员在两个表面上铺设互相垂直的电线形成电线网格,以形成一个个小而密集的感受阵列。同时,他们还将底层柔性层设置成像皮肤棘层一样的不平整的形态。
鲍哲南表示,目前,它已经能够够执行一些重复性的任务,比如重复地在传送带拿起鸡蛋再放入旁边的箱子中。但她并未满足于此,她表示其最终的目标是在目前的基础之上继续升级,最终实现让手臂能在未经过预先设定程序的情况下,也能自动用适当的力度将物体拿起。同时,目前在手套上实现功能也会在未来完全嵌入到机械手臂中。
他进一步指出,在研发安全皮肤必须兼顾物理和电子特性,化学材料必须均匀批覆,材料配方跟比例则是各家的机密,还要跟多个传感器如力度传感器、温度传感器等、电路设计整合。第一个困难点是触觉传感器必须足够敏感,人的指尖触觉最小感测大小约 8 毫米,机器人示教器维修,机器人的触觉传感器若超过 8 毫米就感觉不到,无法达到效果,那就是缺陷,因此如何让机器人的触觉等同人手、甚至比人手还精密就考验各家厂商的技术,原见精机的方案可做到 5 毫米。
图|蓝色表皮为用于工业机器手臂的安全皮肤(资料来源:原见精机官网)
另一个安全防护方式就是“安全皮肤”,将其包覆在机器手臂上使用,让机器有触觉,当机器碰触到人或物体,机器手臂就会立刻停下,就像被点穴一样,人一碰就停住。目前欧洲、日本的工业机器人大厂包括川崎重工、abb、Epson 等也有意采用安全皮肤。
第二是皮肤材料的耐用度,由于工业环境往往较为严峻,而且机器人及相关组件对于高温和高强度的冲击必须达到国际安全标准,所以目前工业机器人用的皮肤厚度比起实验室开发的来得厚重,但追求轻薄是必定的方向。第三是环境温湿度也会对传感器的灵敏度、耐久性造成影响。
https://news.stanford.edu/2018/11/21/stanford-develops-electronic-glove-gives-robots-sense-touch/
我们知道,人类的表层皮肤充满了感受器,可以感受到压力,热量和其他刺激。在皮肤感受外界压力时,皮肤中的棘层起到了重要的作用。棘细胞表面有许多棘状突起,当外界有压力传来时,外层皮肤层在压力作用下率先接触到突起的顶端,触觉由此产生;当压力增大时,外层皮肤层会继续接触到这些突起的底部。在这样的机制下,我们能够自然的感受到外界对皮肤的压力同时判断压力的大小。
-End-
原见精机总经理卢元立接受 DT 君采访时表示,过去在工厂、汽车生产间环境的机器手臂负载(payload)高、加上追求高耐用度,所以体积都很庞大,过去都是设置围栏阻隔的方式来避免危险发生。但许多工厂环境、小流水线的流程是人类与机器合作生产产品,因此近年兴起的一项趋势是协同机器人,来提高人机协作的安全性。
其他还有像是休斯顿大学(University of Houston)机械工程系助理教授余存江,也是《麻省理工科技评论》中国区“35 岁以下科技创新 35 人”的获选者,他与团队开发出可拉伸全橡胶电子器件材料能应用在人造皮肤材料上,将其包裹或穿戴在机器人手上,机器人变得有触觉,可以感知杯子的水是冰或热。
- 工业机器人维修保养注意事项有哪些?(2023-10-07)
- 发那科工业机器人常规保养维护方法有哪些?(2023-10-07)
- 发那科机器人电路板维修中的办法与技巧(2023-10-07)
- 工业机器人电机故障有哪些原因?(2023-10-07)
- 发那科机器人维修中需要注意哪些问题?(2023-10-07)
- 工业机器人维护保养主要步骤有哪些?(2023-10-07)


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7