-
 发那科机器人变压器油箱焊接节气装置
2026-01-28 发那科机器人维修
发那科机器人变压器油箱焊接节气装置
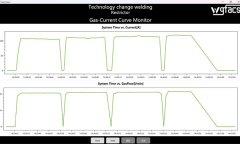
2026-01-28 发那科机器人维修变压器油箱焊接对密封性与结构强度的严苛要求,决定了保护气体供给必须兼顾稳定性与精准性。作为承载变压器核心部件的关键结构,油箱焊缝一旦出现氧化、气孔等缺陷,极易引发后期运行渗漏,影响设备安全稳定。 ...[查看全文]
-
 发那科机器人平衡缸震动维修
2026-01-28 发那科机器人维修
发那科机器人平衡缸震动维修
2026-01-28 发那科机器人维修发那科机器人平衡缸通过液压或气动驱动原理平衡机械臂自重,大幅降低伺服电机运行负荷,是保障关节运动平顺性与定位精准度的关键部件。其整体结构涵盖缸体、活塞杆、密封组件、蓄能器及调压机构,各部件协同配合实现压力稳定传递,适配多款主流机型的关节驱动 ...[查看全文]
-
 发那科焊接机器人氩弧焊节气设备
2026-01-27 发那科机器人维修
发那科焊接机器人氩弧焊节气设备
2026-01-27 发那科机器人维修发那科焊接机器人在氩弧焊领域的应用愈发广泛,凭借出色的电弧稳定性与轨迹控制精度,能精准适配不锈钢、铝合金等材质的精密焊接场景。 ...[查看全文]
-
 FANUC发那科机器人A06B驱动器模块炸坏维修
2026-01-27 发那科机器人维修
FANUC发那科机器人A06B驱动器模块炸坏维修
2026-01-27 发那科机器人维修FANUC发那科机器人A06B驱动器模块是伺服系统的动力核心部件,承担着电能向机械动力的精准转化任务。 ...[查看全文]
-
 发那科弧焊机器人钢结构焊接节气装置
2026-01-26 发那科机器人维修
发那科弧焊机器人钢结构焊接节气装置
2026-01-26 发那科机器人维修WGFACS节气装置是专为发那科弧焊机器人钢结构焊接场景打造的定制化控气设备,核心依托焊接气体流量自适应控制技术,实现与发那科机器人的深度适配。 ...[查看全文]
-
 发那科机器人M-900iB伺服电机断轴维修
2026-01-26 发那科机器人维修
发那科机器人M-900iB伺服电机断轴维修
2026-01-26 发那科机器人维修发那科M-900iB系列机器人作为六轴重载工业装备,伺服电机是其关节动力输出的核心部件,承担扭矩传递、精准调速及位置反馈等关键职能,广泛应用于汽车制造、重型机械加工、仓储物流等行业的重载搬运与装配场景。 ...[查看全文]
-
 发那科机器人示教器无法触摸维修
2026-01-23 发那科机器人维修
发那科机器人示教器无法触摸维修
2026-01-23 发那科机器人维修发那科机器人示教器是整机人机交互的核心载体,承担着程序编撰、参数调试、运动操控及设备状态实时监控等关键任务,其触摸功能的灵敏性与稳定性直接影响生产节拍与操作安全性,广泛应用于汽车焊装、精密电子装配等高端制造场景。 ...[查看全文]
-
 发那科机器人R-2000iC减速机轴承损坏维修
2026-01-22 发那科机器人维修
发那科机器人R-2000iC减速机轴承损坏维修
2026-01-22 发那科机器人维修发那科R-2000iC机器人作为重载工业场景主力机型,其关节减速机内置精密交叉滚子轴承,承担动力传递与定位支撑的核心职责,轴承损坏直接导致关节卡滞、定位偏差超标,甚至引发减速机齿轮啮合异常。 ...[查看全文]
-
 发那科机器人散货船焊接节气装置
2026-01-21 发那科机器人维修
发那科机器人散货船焊接节气装置
2026-01-21 发那科机器人维修发那科机器人在散货船焊接作业中,需适配甲板、龙骨、肋骨等多类部件的复杂焊接需求,板材厚度差异大、工位分散且作业环境多粉尘、高湿度,对混合气供给的精准度与稳定性要求远超普通场景。 ...[查看全文]
-
 FANUC发那科弧焊机器人减速机齿轮磨损维修
2026-01-21 发那科机器人维修
FANUC发那科弧焊机器人减速机齿轮磨损维修
2026-01-21 发那科机器人维修发那科弧焊机器人的减速机是关节动力传递的核心枢纽,齿轮啮合精度直接决定机械臂焊接轨迹的稳定性与焊缝质量,一旦出现齿轮磨损,会直接破坏传动系统的精准性。这类故障在弧焊作业中尤为突出 ...[查看全文]
-
 FANUC发那科机器人主轴驱动器故障维修
2026-01-20 发那科机器人维修
FANUC发那科机器人主轴驱动器故障维修
2026-01-20 发那科机器人维修FANUC发那科机器人主轴驱动器作为主轴动力控制核心载体,承担转速调节、扭矩输出、过载保护及信号反馈功能,直接决定主轴运行精度、稳定性及负载适配能力。 ...[查看全文]
-
 发那科机器人汽车门框焊接节气装置
2026-01-19 发那科机器人维修
发那科机器人汽车门框焊接节气装置
2026-01-19 发那科机器人维修汽车门框作为车身核心承力结构件,直接关系车身刚性与行驶安全,焊接工艺对焊缝成形、耐腐蚀性及结构强度要求严苛。 ...[查看全文]
-
 FANUC发那科工业机械手控制柜故障维修
2026-01-19 发那科机器人维修
FANUC发那科工业机械手控制柜故障维修
2026-01-19 发那科机器人维修FANUC发那科工业机械手控制柜作为整机控制中枢,集成电源模块、伺服驱动单元、CPU主板、I/O接口模块及散热系统,承担指令运算、信号传输、动力分配及故障预警等重要职责,运行稳定性直接决定机械手作业精度与生产线连续运转能力。 ...[查看全文]



