您现在的位置是:
-
 川崎机器人故障报警代码维修排除方法
2019-12-13 维修案例
川崎机器人故障报警代码维修排除方法
2019-12-13 维修案例川崎机器人故障排除参考方法 首先,第一时间做好系统数据备份工作。了解故障现象,通过现场一些设备的基本现象和现场技术人员的描述进行判断,会比较有效率,。 例如,根据一位现场工程师的描述川崎控制器偶发会产生自动重启现象,这个重启过程中会看到快要 ...[查看全文]
-
 开机出现SRV0-214故障怎么解决-故障案例分析
2019-12-11 维修案例
开机出现SRV0-214故障怎么解决-故障案例分析
2019-12-11 维修案例FANUC机器人SRVO故障案例 故障现象:新机安装后开机出现SRV0-214 如果对故障代码不熟悉的朋友可以查询FANUC故障代码手册 看下说明,可以快速找到真因 示教操作盘上会显示出FUSE BLOWN (AMP)(SRVO-214)(6轴放大器保险丝熔断)和Hand broken(SRVO-006) ...[查看全文]
-
 FANUC发那科机器人伺服放大器LED故障诊断维修案例
2019-12-10 维修案例
FANUC发那科机器人伺服放大器LED故障诊断维修案例
2019-12-10 维修案例FANUC机器人控制柜上伺服放大器上有很多的LED显示灯,这个主要是用来进行故障排查所用。在示教器系统产生报警时,可以进一步判断故障真因。 1、通过LED的显示精确判断故障状态。下图为我们打开R-30IB控制柜后,会看到内部硬件结构的一个布局。 下图红色部分 ...[查看全文]
-
伺服电机报警9011、439故障内容及处理方法2019-11-16 伺服电机维修
PSM上显示7主轴9011报警内容:DC回路电压异常升高. 439报警:PSMDClink电压过高,或者a,系列SVU的DC link电压过高处理方法: 1.再生能量过高(主轴或电机频繁加减速)超过单元的容量2.电源的阻抗过高(最大输出时电网波动不应超过70%) 3.PSM故障9011报警: ...[查看全文]
-
 发那科FANUC机器人控制柜常见故障问题检测
2019-11-16 电路板维修
发那科FANUC机器人控制柜常见故障问题检测
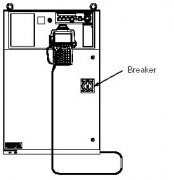
2019-11-16 电路板维修检查及维修 控制器部件 检查1:控制器断路器开且没有跳闸 维修: 合上断路器 检查 2:查看电源板(PSU)上的LED指示 灯(GREEN)是否亮。 维修: 如果 LED指示灯没亮可能是PSU 的200V供电电源没有或PSU上的F1保险丝毁坏: 1如果200V电源没有请检查供电 线路 ...[查看全文]
-
 发那科机器人主板维修,故障问题检测
2019-11-16 电路板维修
发那科机器人主板维修,故障问题检测
2019-11-16 电路板维修电容损坏引发的故障在电子设备中是特别高的,其中尤其以电解电容的损坏为常见 电容损坏表现为:1.容量变小;2.完全失去容量;3.漏电;4.短路。 电容在电路中所起的作用不同,引起的故障也各有特点。在发那科电路板维修中,数字电路占绝大多数,电容多用做电 ...[查看全文]
-
一文Get机器人常见故障及解决方案2018-11-22 发那科资讯
一文Get机器人常见故障及解决方案 自从20世纪60年代初,人类创造了第一台工业机器人以后,工业机器人就显示出它极大的生命力,在短短40多年的时间中,工业机器人技术得到了迅速的发展,工业机器人已在工业发达国家的生产中得到了广泛的应用。 目前,工业机 ...[查看全文]
-
ABB工业机器人应用常见故障问题解答2018-10-22 发那科资讯
ABB工业机器人应用常见故障问题解答 问:在什么情况下需要为机器人进行备份? 答:1、新机器第一次上电后。 2、在做任何修改之前。 3、在完成修改之后。 4、如果机器人重要,定期1周一次。 5、最好在U盘也做备份。 6、太旧的备份定期删除,腾出硬盘空间。 问 ...[查看全文]
-
 发那科机器人示教器正常却无法启动机器人(警报003)故障维修
2018-05-04 示教器维修
发那科机器人示教器正常却无法启动机器人(警报003)故障维修
2018-05-04 示教器维修一、案例现象: 示教盒可以工作,但是无法启动机器人。显示SRVO003 SVAL1 Deadman switch released(deadman开关没有被按下)。 二、原因分析: 提示deadman开关没有被按下. deadman开关是一个三方向开关。不要将开关按到第二个开的位置。开关只能在中间的位 ...[查看全文]
-
 点焊机器人工作过程中出现J4轴减速器自动下滑故障维修
2018-07-28 发那科机器人维修
点焊机器人工作过程中出现J4轴减速器自动下滑故障维修
2018-07-28 发那科机器人维修一、案例现象: FANUCR-2000iB/165F六轴点焊机器人工作过程中出现J4臂自动下滑现象,机器人报伺服故障,故障代码为SERVO-023,代码解释为:SERVOStoperrorexcess(Group:%1Axis:%4),当电机停止时,产生一个过度伺服位置错误。 二、原因分析: 将机器人停 ...[查看全文]
-
 发那科焊接机器人位置对合动作中停止运作故障维修
2018-04-17 焊接机器人保养
发那科焊接机器人位置对合动作中停止运作故障维修
2018-04-17 焊接机器人保养一、案例现象: 这一状态,只在无电池型焊枪的情形下发生。其现象和应对方法根据所设定的位置对合动作类型而不同,应予以注意。 二、 对策措施: 1、焊枪的脉冲值及调校数据已经丢失。首先,通过手动进给使焊枪动作,解除SRVO-075报警。 有的情况下可能不会 ...[查看全文]
-
 发那科焊接机器人在应用中常见的故障及解决措施
2018-05-09 焊接机器人保养
发那科焊接机器人在应用中常见的故障及解决措施
2018-05-09 焊接机器人保养本文介绍了发那科焊接机器人在实际生产操作应用中可能出现的故障问题如:咬边问题、气孔问题、飞溅过多问题等,并提供了解决措施,欢迎参考 ...[查看全文]
-
 发那科弧焊机器人编程故障如何修复
2018-04-10 焊接机器人保养
发那科弧焊机器人编程故障如何修复
2018-04-10 焊接机器人保养设备程序编写故障,该类故障一般出现在程序第一次编写时或者试运行时,排除该类故障需要编程人员认真检查程序内容并进行修改即可。下面结合两个例子进行说明 ...[查看全文]
-
发那科弧焊机器人工作站弧焊寻位程序故障专业维修
2018-04-10 焊接机器人保养
弧焊机器人工作站弧焊寻位程序故障,此类故障的报警前缀一般为THSR,该类故障应着重检查与寻位相关的参数设置、硬件连接和寄存器状态。下面结合两个例子进行说明。 (1)FANUCM10i弧焊机器人配备R30iB控制系统在正常工作中出现报警THSR-030还没有搜查开始, ...[查看全文]
-
 FANUC焊接机器人控制系统的原理及典型故障处理
2018-05-08 焊接机器人保养
FANUC焊接机器人控制系统的原理及典型故障处理
2018-05-08 焊接机器人保养本文重点介绍了FANUC焊接机器人控制系统的原理,对FANUC机器人控制系统结构和各部分的功能进行了阐述,对其出现的一些典型故障处理及日常维护注意事项进行了分析。 ...[查看全文]

Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7