您现在的位置是:
-
 发那科FANUC机器人本体电缆更换详细流程
2019-12-31 维修案例
发那科FANUC机器人本体电缆更换详细流程
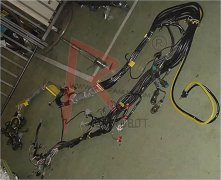
2019-12-31 维修案例对R-2000i机器人进行更换本体电缆操作,该型号的本体电缆分为动力电缆和编码器电缆,更换的方法类似。 使用工具清单: 内六角扳手一套、斜口钳、十字螺丝刀,一字螺丝刀、鱼嘴钳、退针器、尼龙扎带若干。 作业中安全用品一览: 安全帽、安全挂锁、手套、安全 ...[查看全文]
-
 发那科FANUC机器人KAREL程序的配置详解
2019-12-30 示教器维修
发那科FANUC机器人KAREL程序的配置详解
2019-12-30 示教器维修KAREL程序支持功能的添加 之前都是使用ShiftFWD的方式执行手动执行PC程序,但如果想实现类似于TP程序后台逻辑一样的功能,则需要使用KAREL程序支持功能。使用KAREL程序支持功能,需要添加额外的软件包J971,即KARELUseSprtFCTN这个功能选项包,只有当添加了 ...[查看全文]
-
 发那科FANUC机器人内部线缆更换(安装部分)
2019-12-28 维修案例
发那科FANUC机器人内部线缆更换(安装部分)
2019-12-28 维修案例通过拆解,准备更换新的线缆,进行安装。 1、在装线缆之前,先在电缆有标记的位置进行安装和固定,包括一些尼龙保护带,电缆保护套等。 2、从2轴臂侧边插入电缆,同时引到1轴底座侧。 3、把2轴臂盖安装后再将3轴外套部穿入电缆。 4、在3轴外套部分线板上 ...[查看全文]
-
 发那科FANUC机器人抓取程序案例
2019-12-27 维修案例
发那科FANUC机器人抓取程序案例
2019-12-27 维修案例1:TIMER[1]=RESET 2:TIMER[1]=START 3:UTOOL_NUM=1 [工具坐标系1] 4:UFRAME_NUM=1 [用户坐标系1] 5:OVERRIDE=50% [速度50%] 6:D0[101]=OFF [机器人抓手关闭状态] 7:WAIT DI[105]=ON [回原点信号] 8:WAIT DI[101]=ON [机器人抓手原位磁性开关] 9:J P[1] 50% F ...[查看全文]
-
 发那科Fanuc机器人指令编辑大全
2019-12-25 示教器维修
发那科Fanuc机器人指令编辑大全
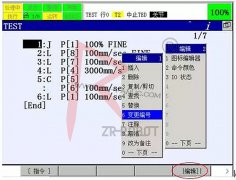
2019-12-25 示教器维修程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对变更编号、取消及改为备注三个功能做详细介绍。 1.变更编号(Renumber) 该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加 ...[查看全文]
-
 发那科FANUC发生报警MOTN-023或者MOTN-063奇异点的解决方法
2019-12-24 维修案例
发那科FANUC发生报警MOTN-023或者MOTN-063奇异点的解决方法
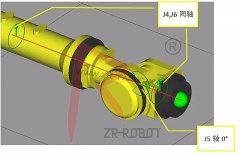
2019-12-24 维修案例在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。 图1机器人奇异点位置 当机器人J5轴处于0位置,机器人会出现MOTN-023报警: 图2MOT ...[查看全文]
-
 怎么样通过主板LED灯色判断发那科机器人主板故障
2019-12-23 电路板维修
怎么样通过主板LED灯色判断发那科机器人主板故障
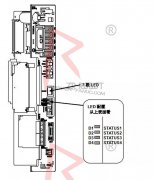
2019-12-23 电路板维修FANUC机器人主板启动故障(状态分析) 在通电后,通过主板状态显示LED灯色进行判断。在启动过程中D1/D2/D3/D4所组合的灯数数量进行识别,比如上电D1/D2/D3/D4同时亮起,卡主不动,基本可以判断为主板损坏。下面我列出了从开机上电到完全正常开机的状态灯组合 ...[查看全文]
-
 发那科FANUC机器人程序加注解全流程
2019-12-19 维修案例
发那科FANUC机器人程序加注解全流程
2019-12-19 维修案例1.先点击MENU-设置-其它 2.点击Remark键 3.显示界面如下图所示 4.按ENTER键 5.输入注解内容 最后,完美完成! ...[查看全文]
-
 FANUC发那科弧焊机器人常见故障怎么处理
2019-12-18 维修案例
FANUC发那科弧焊机器人常见故障怎么处理
2019-12-18 维修案例自动弧焊机器人工作站一般由弧焊机器人及控制器、外围操作机连锁机构和焊接电源组成,在设备故障排除时可以根据故障代码并结合各模块进行设备维修。 1.弧焊机器人运动部位故障 弧焊机器人运动部位故障,该故障一般报警代码前缀为SRVO,出现该故障报警时需要 ...[查看全文]
-
 怎么修改发那科FANUC机器人位置信息
2019-12-14 电路板维修
怎么修改发那科FANUC机器人位置信息
2019-12-14 电路板维修修改位置信息条件如下: 已选定需修改的程序 示教盒处于ON状态 修改位置信息有以下两种方法: 1.示教修改法 2.直接输入法 方法一:示教修改法 1)移动光标到需修正位置的动作指令的行号处; 2)示教机器人到新位置; 3)按【SHIFT】+F5【点修正】即可记录新位置 ...[查看全文]
-
 FANUC发那科机器人伺服放大器LED故障诊断维修案例
2019-12-10 维修案例
FANUC发那科机器人伺服放大器LED故障诊断维修案例
2019-12-10 维修案例FANUC机器人控制柜上伺服放大器上有很多的LED显示灯,这个主要是用来进行故障排查所用。在示教器系统产生报警时,可以进一步判断故障真因。 1、通过LED的显示精确判断故障状态。下图为我们打开R-30IB控制柜后,会看到内部硬件结构的一个布局。 下图红色部分 ...[查看全文]
-
 FANUCR2000iB发那科机器人保养有哪些
2019-12-09 机器人保养
FANUCR2000iB发那科机器人保养有哪些
2019-12-09 机器人保养1.机器人保养的重要性 机器人都需要预防性保养,这样可以保证它们在生产线上保持最佳性能和实现一致性。当机器人没有进行定期的预防性保养检查,可能会导致零部件损坏或故障,从而致使生产放慢甚至停机。对机器人的正确保养可能会延长其寿命多年甚至数十年, ...[查看全文]
-
发那科机器人三点法TCP校准2019-12-06 维修案例
FANUC机器人TCP校准 缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(ToolCenterPoint)。 工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储 ...[查看全文]
-
 发那科FANUC机器人电路板维修案例
2019-12-05 维修案例
发那科FANUC机器人电路板维修案例
2019-12-05 维修案例对待修的机器人电路板,首先应对其进行目测。必要时还要借助于放大镜观察。主要看: 1.是否有断线和短路处;尤其是机器人电路板上的印制板连接线是否存在断裂,粘连等现象; 2.有关元器件如电阻,电容,电感,二极管,三极管等是否存在断开现象; 3.是否有人 ...[查看全文]
-
 FANUC发那科机器人保养及零点校正方法
2019-12-04 码垛机器人保养
FANUC发那科机器人保养及零点校正方法
2019-12-04 码垛机器人保养那科FANUC机器人保养 一、发那科FANUC机器人机械手机器人轴: 二发那科FANUC机器人齿轮箱: 三、发那科FANUC机器人电缆状态:信号电缆,动力电缆,用户电缆,底电缆,立臂电缆。 四、发那科FANUC机器人固定状态: 五、发那科FANUC机器人电池:机器人本体电池 ...[查看全文]

Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7