您现在的位置是:
-
 发那科FANUC机器人操作培训课程视频-Ref Position
2019-08-24 维修案例
发那科FANUC机器人操作培训课程视频-Ref Position
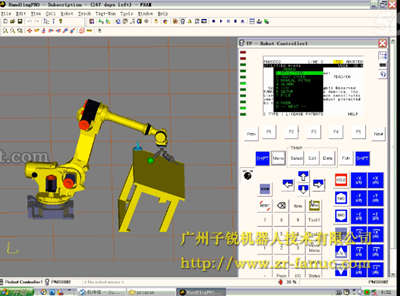
2019-08-24 维修案例本视频内容为发那科仿真编程与操作——修改默认运动指令格式,供广大网友学习和交流所用。 ...[查看全文]
-
 发那科FANUC机器人操作培训课程视频-MACRO
2019-08-22 维修案例
发那科FANUC机器人操作培训课程视频-MACRO
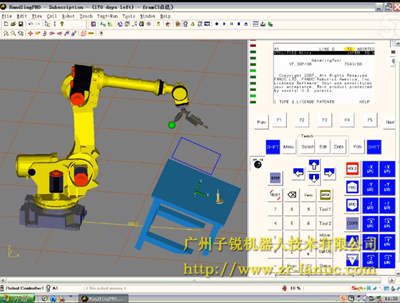
2019-08-22 维修案例本文视频内容为FANUCE发那科视频教程:仿真编程与操作之修正点,供广大网友学习和交流所用,请勿用作商业用途。 ...[查看全文]
-
 发那科FANUC机器人操作培训课程视频-user fram(3点法)
2019-08-21 维修案例
发那科FANUC机器人操作培训课程视频-user fram(3点法)
2019-08-21 维修案例本文视频内容为Fanuc发那科仿真编程与操作视频教程 终止类型,仅供广大网友参考。 ...[查看全文]
-
 带你认识发那科新品——P-40iA喷涂机器人
2018-07-02 发那科资讯
带你认识发那科新品——P-40iA喷涂机器人
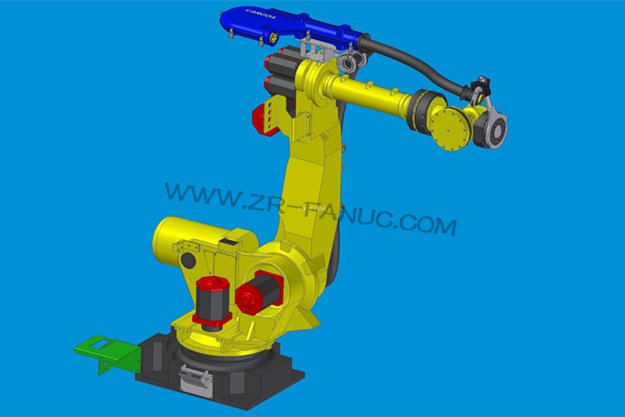
2018-07-02 发那科资讯为了向用户提供更有竞争力的喷涂机器人,2017年底,FANUC在中国市场正式推出了新型的P-40iA喷涂机器人。P-40iA的上市提高了FANUC喷涂机器人在小型工件自动化喷涂行业中的竞争优势。 P-40iA喷涂机器人采用的是FANUC喷涂机器人标志的铝合金金属防爆机身。更优 ...[查看全文]
-
 发那科机器人设备搬迁,工厂工业机器人搬家有哪些注意事项
2018-06-01 搬运机器人保养
发那科机器人设备搬迁,工厂工业机器人搬家有哪些注意事项
2018-06-01 搬运机器人保养随着科技的进步,工业机器人在越来越多的行业开始普及起来,渐渐代替了人类进行一些劳力重复操作的工资。目前,我国的工业机器人数量正以飞快的速度在增长,许多企业都引进了工业机器人生产和工作。 随着企业的发展扩大,避免不了要搬厂迁移公司,其中涉及关 ...[查看全文]
-
走进智能制造时代的中国机器人
2018-05-30 发那科资讯
作为智能制造的重要装备,工业机器人的需求不断攀升,国内厂商遍地开花,然而当机器人热潮逐渐褪去,引发了更多思考,行业厂商如何根据自身条件谋求进一步发展?工业机器人有哪些蓝海应用行业?未来机器人行业的发展趋势是什么? 2018年5月9~11日,由国家工 ...[查看全文]
-
 发那科机器人伺服器A06B-6077-H106直流电压过低(警报047)维修
2018-05-21 伺服电机维修
发那科机器人伺服器A06B-6077-H106直流电压过低(警报047)维修
2018-05-21 伺服电机维修一、故障现象及原因分析: 警报显示:SRVO--047 SERVO LVAL alarm(Group:%d Axis:%d) ,尽管伺服放大器处于一个外界磁场中,其主电路电源供应或是控制电源工艺电压(+5伏)直流电压过低。 二、 解决方法: 1. 当伺服放大器PSM的发光二极管显示为6(当其主电 ...[查看全文]
-
 发那科搬运机器人M-2000iA无法控制操作(警报034)故障维修
2018-05-21 搬运机器人保养
发那科搬运机器人M-2000iA无法控制操作(警报034)故障维修
2018-05-21 搬运机器人保养一、故障现象及原因分析: 试图执行简单控制,但所需的参考点尚未设立。现实警报信息:SRVO--034 WARN Ref pos not set (Group:%d) 。 二、解决方法: 在校准界面为执行简单控制设立一个参考点,重新启动后再进行操作。 ...[查看全文]
-
 发那科机器人示教器A05B-2490-C200输入命令无效(报警025)维修
2018-05-17 示教器维修
发那科机器人示教器A05B-2490-C200输入命令无效(报警025)维修
2018-05-17 示教器维修一、案例现象: 在发那科机器人示教器A05B-2490-C200上输入命令无效,显示 SRVO--025 SERVO Motn dt overflow (Group:%d Axis:%d) 二、可能原因: 命令输入值过大。 三、解决方法: 执行冷启动: 1.关闭机器人。 2.在教导盒上,同时按住SHIFT和RESET键。 3 ...[查看全文]
-
 发那科搬运机器人M-20iA控制设备温度过高(警报015)故障维修
2018-05-17 搬运机器人保养
发那科搬运机器人M-20iA控制设备温度过高(警报015)故障维修
2018-05-17 搬运机器人保养一、故障现象: 发那科搬运机器人M-20iA运行过程中控制设备提示温度过高,显示SRVO--015 SERVO System over heat。 二、可能原因: 控制设备的温度超过标定值。 三、解决方法: 1. 如果环境温度比标定温度(45摄氏度)高的话,改善通风以降低环境温度到标定 ...[查看全文]
-
揭秘松下焊接机器人技术——LAPRISS
2018-05-16 发那科资讯
松下研发出了结合自身所拥有的自动控制技术、焊机头,利用先进波长合成技术的振荡器等激光加工所需的元素,搭载4kW直接半导体激光器的全球首款远程遥控激光焊接自动控制系统,这就是LAPRISS。 Panasonic于1957年启动焊接业务,以往厂商在对汽车车体等进行金 ...[查看全文]


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7