脑机接口新突破:首款无创脑控机器人手臂诞生
时间:2020-08-27 来源:互联网 阅读次数:
在最新发表的这篇论文中,贺斌和同事在开发低侵入性或非侵入性的脑机接口技术方向取得突破性进展。他们利用新颖的传感和机器学习技术,机器人维修,通过无创神经成像和一种新的连续追踪范式,克服了嘈杂的脑电图信号,显著改善基于脑电图的神经解码,从而实现实时连续的机器人设备控制。
然而,机器人维修,到目前为止,那些脑机接口成功地控制机械手臂的研究,都使用了侵入性的大脑植入物。这些植入物需要大量的医学和外科专业知识才能正确安装和操作,机器人维修,更不用说成本和对受试者的潜在风险。因此,它们的应用仅限于少数临床病例。
到目前为止,这项技术已经在 68 名身体健全的人类受试者中进行了测试(每个受试者最多进行 10 次测试),包括虚拟设备控制和用于持续追踪的机械手控制。接下来,研究小组还计划在患者身上进行相关的临床试验。
如今,脑机接口技术已经被证明能够很好地利用大脑植入物的信号来控制机器人设备。当机器人设备可以被高精度控制时,它们可以用来完成各种日常任务。
无创脑机接口是最终目标
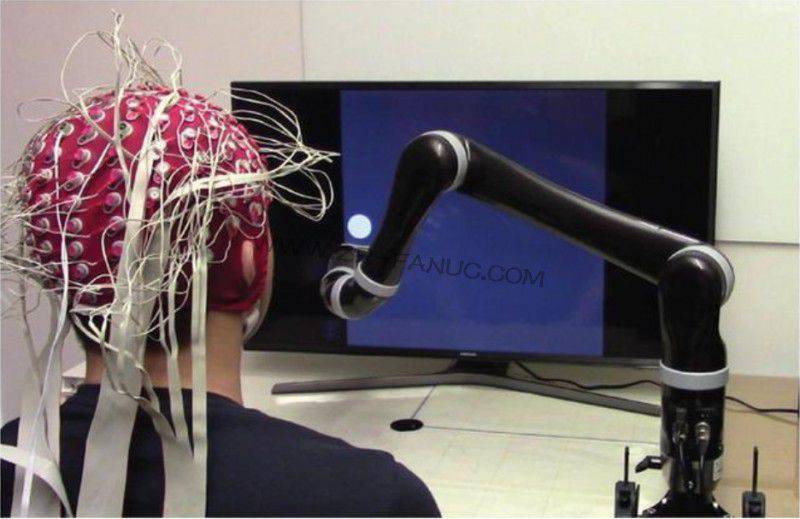
利用非侵入性脑机接口技术,研究人员首次在人类受试者身上,成功实现控制机器人手臂连续跟踪计算机屏幕上的光标。在这之前,由人类非侵入性控制的机械手臂会跟随移动的光标做出不稳定、不连续的动作,而现在,手臂会沿着平滑、连续的路径跟随光标。
研究团队还建立了一个新的框架,通过增加用户参与和训练以及脑电信号源成像无创神经数据的空间分辨率,解决和改进脑机接口的“大脑”和“计算机”组件。研究结果表明,该团队解决这一问题的独特方法不仅将 BCI 学习提高近 60%,还将计算机光标的连续跟踪能力提高了 500% 以上。
仅依靠大脑意识实现无创控制机器人装置,将具有巨大的应用潜力,尤其是将改变瘫痪患者和运动障碍患者的生活。
来自卡内基梅隆大学与明尼苏达大学的研究人员日前利用无创的脑机接口(BCI)技术,成功开发出第一款由大脑控制的机器人手臂,具有连续跟踪计算机光标的能力。该成果发表在 Science Robotics上。
(来源:Carnegie Mellon University)
无创大脑控制机器人手臂
图 | 无创脑机接口(来源:Science Robotics)
在科幻作品中,意念控制的实现可以顺手拈来、轻而易举。而在现实世界中,其背后支持性的技术——脑机接口技术也已有近百年的历史。

一直以来,机器人维修,科学家们希望能够在脑机接口领域实现科学研究与应用技术的突破,为许多当前仍无法解答的难题提供更好的探索工具,帮助人类进一步了解自己的大脑,预防、诊断、治疗脑部疾病,并将这一技术广泛应用于睡眠管理、智能生活和残疾人康复等领域。
“尽管使用非侵入性信号存在技术挑战,但我们完全致力于将这种安全和经济的技术带给可以从中受益的人,”贺斌说。“这项工作代表了无创脑机接口的重要一步,这项技术有朝一日可能成为帮助每个人的普遍辅助技术。”
另一方面,使用非侵入性外部传感还存在诸多问题,如脑机接口设备接收的信号“更杂”,导致信号分辨率较低和更不精确的控制。开发侵入性较小甚至完全无创的脑机接口技术,子锐机器人维修,使瘫痪患者能够利用自己的“思想”控制机器人肢体,是脑机接口领域的一大挑战。这种非侵入性脑机接口技术如果成功,将会给许多患者甚至普通人带来巨大的改变。
卡内基梅隆大学生物医学工程系主任贺斌表示,使用脑部植入物的大脑控制机器人设备已经取得了重大进展,这是一门出色的科学。但非侵入性是最终目标,神经解码的进步和无创机器人手臂控制的实用性将对非侵入性神经机器人的最终发展产生重大影响。
这项技术还可以通过提供安全的、非侵入性的“意识控制”设备来帮助各种各样的人,这些设备可以让人们与环境互动并控制他们的环境。


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7