-
 ���ǿƺ��ӻ�����M-10iA��Ұ�Ǩ��װλ��רҵ����
2018-05-22 ���ӻ����˱���
���ǿƺ��ӻ�����M-10iA��Ұ�Ǩ��װλ��רҵ����
2018-05-22 ���ӻ����˱���������Ǩ�Ǹ��̣����һ���ŵĹ�ҵ�����ˣ���ΰ����Dz�ж����������ã������ٵ���װ���ԣ����Ǹ������⣬������Ҫ��Ӳ�ļ���֧�֣�����Ҫרҵ���Ŷ�Э��������������������˼�������˾ӵ��һ֧������Ӳ������רҵ���Ŷӣ�Ϊ���ṩרҵ�Ļ�����λ�� ...[�鿴ȫ��]
-
 ������λ�Ʒ����ǿư��˻�����R-2000iB�����ж��װ����
2018-05-22 ���˻����˱���
������λ�Ʒ����ǿư��˻�����R-2000iB�����ж��װ����
2018-05-22 ���˻����˱������ǿư��˻�����R-2000iB��λ�Ʒ���ӭ��ѯ������������˼�������˾�� ���ڳн� ����װж��ҵ�����˵ȸ��ַ��ӹ�ҵ�����˵IJ�ж����������������䡢ж������װ�����Ե�һЩ��ȫ��λ���� ��������ҵ����������˾רҵ���¹��ز�Ʒ��ά������ ...[�鿴ȫ��]
-
 �����˰���װж���ǿư��˻�����LR-Mate-200iDλ��רҵ����
2018-05-22 ���˻����˱���
�����˰���װж���ǿư��˻�����LR-Mate-200iDλ��רҵ����
2018-05-22 ���˻����˱�����������ҵ����������˾רҵ���¹��ز�Ʒ��ά�������ۣ��ǻ��ϵ���ʾ����ά�����ʵ��ά�������ģ��������Ŷ���רҵоƬ��ά�ļ������飬�����˹�ҵ�����˱���ά�ĺ��ļ�����ά�����ڶ̡��շѺ����� ������������˼�������˾ ���ǿ�FANUC������ ...[�鿴ȫ��]
-
 ���ǿư��˻�����M-2000iA�����Ʋ���������034������ά��
2018-05-21 ���˻����˱���
���ǿư��˻�����M-2000iA�����Ʋ���������034������ά��
2018-05-21 ���˻����˱���һ����������ԭ������� ��ͼִ�м��ƣ�������IJο�����δ��������ʵ������Ϣ��SRVO--034 WARN Ref pos not set (Group:%d) �� ������������� ��У����Ϊִ�м�������һ���ο��㣬�����������ٽ��в����� ...[�鿴ȫ��]
-
 ���ǿư��˻�����M-20iA���趨�ο��㣨����033������ά��
2018-05-17 ���˻����˱���
���ǿư��˻�����M-20iA���趨�ο��㣨����033������ά��
2018-05-17 ���˻����˱���һ���������� ���ǿư��˻�����M-20iA��ͼΪ�����趨һ���ο��㣬������ɡ���ʾSRVO--033 WARN Robot not calibrated(Group:%d)�� ��������ԭ�� ������У��δ��ɡ� ������������� �����в���ִ��У�� 1�� ��Դ�� 2����У����[6SYSYTE ...[�鿴ȫ��]
-
 ���ǿư��˻�����M-20iA�����豸�¶ȹ��ߣ�����015������ά��
2018-05-17 ���˻����˱���
���ǿư��˻�����M-20iA�����豸�¶ȹ��ߣ�����015������ά��
2018-05-17 ���˻����˱���һ���������� ���ǿư��˻�����M-20iA���й����п����豸��ʾ�¶ȹ��ߣ���ʾSRVO--015 SERVO System over heat�� ��������ԭ�� �����豸���¶ȳ����궨ֵ�� ������������� 1. ��������¶ȱȱ궨�¶ȣ�45���϶ȣ��ߵĻ�������ͨ���Խ��ͻ����¶ȵ��궨 ...[�鿴ȫ��]
-
 ���ǿư��˻�����M-20iA�ź������쳣������010������ά��
2018-05-17 ���˻����˱���
���ǿư��˻�����M-20iA�ź������쳣������010������ά��
2018-05-17 ���˻����˱���һ���������� �������ź������쳣����ʾSRVO--010 SERVO Belt broken ��������ԭ�� �������ź����루RDI[7]�������� ������������� 1����������Ǵ����ѣ�����������Ȼ��reset���� 2. ������ִ��������ģ����������������ź�RDI[7]�����쳣���鿴�� ...[�鿴ȫ��]
-
 ���ǿư��˻�����M-20iA��Դ�����쳣������013������ά��
2018-05-17 ���˻����˱���
���ǿư��˻�����M-20iA��Դ�����쳣������013������ά��
2018-05-17 ���˻����˱���һ���������� ������������Դ����������ʱ�����쳣����������ʾSRVO--013 SYSTEM Srvo module config changed ��������ԭ�� ��Դ��������������ʱ���������ӡˢ��·���ϺͶ��ӡˢ��·���DSPģ���е������ļ����ġ� ������������� ���������ķ� ...[�鿴ȫ��]
-
 ���ǿư��˻�����LR-Mate-200iD�ŷ���MCC��������022��ά��
2018-05-10 ���˻����˱���
���ǿư��˻�����LR-Mate-200iD�ŷ���MCC��������022��ά��
2018-05-10 ���˻����˱������Ľ����˷��ǿư��˻�����LR-Mate-200iD�ŷ��Ŵ������Ե����Ӵ�����������ʾ������SRVO�C022 SVAL1 SRDY on (Group : i Axis : j) ...[�鿴ȫ��]
-
 ���ǿƻ�е�ֱ���ƪ֮�������ṹͼ��
2018-05-10 �������˱���
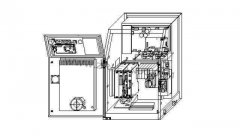
���ǿƻ�е�ֱ���ƪ֮�������ṹͼ��
2018-05-10 �������˱���1��MAIN BOARD�����壩�������ϰ�װ����������������Χ��·���洢�����Լ�������������·����CPU �������ŷ������Ķ�λ���ŷ��Ŵ����ĵ�ѹ�� 2��MAIN BOARD BATTERY���ڿ�������Դ�ر�֮���ά������洢��״̬���䡣 3�� I/O BOARD��FANUC ����/�� ...[�鿴ȫ��]
-
 ���ǿư��˻�����LR-Mate-200iD�ŷ���MCC���ϣ�����021��ά��
2018-05-10 ���˻����˱���
���ǿư��˻�����LR-Mate-200iD�ŷ���MCC���ϣ�����021��ά��
2018-05-10 ���˻����˱������Ľ������ǿư��˻�����LR-Mate-200iD�ŷ��Ŵ������Ե����Ӵ�������������ʾ������SRVO�C021 SVAL1 SRDY off (Group : i Axis : j) ...[�鿴ȫ��]
-
 ���ǿƺ��ӻ�������δ���Ẹǹʱִ��������ָ�����ά��
2018-05-10 ���ӻ����˱���
���ǿƺ��ӻ�������δ���Ẹǹʱִ��������ָ�����ά��
2018-05-10 ���ӻ����˱������Ľ���������ʵ���ϲ������Ẹǹ��������SRVO-068 DTERR alarm�����ŷ�-068 DTERR������֮��������������ͨ�ű�����Ӧ�����������ȡ����Ӧ�취1����2Ӧ�� ...[�鿴ȫ��]
-
 ���ǿƺ��ӻ�����λ�öԺ϶���ʧ�ܣ�����089������ά��
2018-05-10 ���ӻ����˱���
���ǿƺ��ӻ�����λ�öԺ϶���ʧ�ܣ�����089������ά��
2018-05-10 ���ӻ����˱������Ľ����˷��ǿƺ��ӻ�����λ�öԺ϶���ʧ�ܣ�����089������ά�Ĺ���ԭ��ͽ������ ...[�鿴ȫ��]
-
 ���ǿƺ��ӻ�������Ӧ���г����Ĺ��ϼ������ʩ
2018-05-09 ���ӻ����˱���
���ǿƺ��ӻ�������Ӧ���г����Ĺ��ϼ������ʩ
2018-05-09 ���ӻ����˱������Ľ����˷��ǿƺ��ӻ�������ʵ����������Ӧ���п��ܳ��ֵĹ��������磺ҧ�����⡢�������⡢�ɽ���������ȣ����ṩ�˽����ʩ����ӭ�ο� ...[�鿴ȫ��]
-
���ǿư��˻�����M-10iAɲբ������������018������ά��
2018-05-09 ���˻����˱���
һ���������� ���ǿư��˻�����M-10iA��ɲբ������©�磬�ò��ʲ�������������ʾ������SRVO018 SVAL1 Brake abnormal�� ����ԭ������� ���˶�����ƶ��������ŷ��Ŵ����� ALM LED ָʾ�ƾ��������� ���������ʩ�� 1�������������ӵ���(RM1)�� ...[�鿴ȫ��]
- ���ǿ�FANUC������A05B-2301-C335ʾ����ά��
- ���ǿư��˻�����M-2000iA�����Ʋ���������
- ���ǿƻ�����ʾ����A05B-2255-C101������ͣ��
- ���ǿƺ��ӻ�������δ���Ẹǹʱִ��������ָ
- ���ǿƺ��ӻ�������Ӧ���г����Ĺ��ϼ������
- ���ǿƻ�����ʾ����������ͣ��������001��
- ���ǿƻ����˿�������·���������źţ�����
- ���ǿƻ�����ʾ������Ļʧ�鴥����Ӧ��ν�
- ���·��ǿƻ�����J2��������������̡�ͼ����
- �ŷ���������ź�046��ԭ�������

