-
 发那科FANUC机器人保养怎么清理控制柜元器件灰尘
2020-04-30 机器人保养
发那科FANUC机器人保养怎么清理控制柜元器件灰尘
2020-04-30 机器人保养夏日炎炎,为了使机器人的性能保持在稳定的状态,需要我们对控制柜易积灰的元器件进行及时清理,贴心的小编特别为你制作了清理教程,看完后就赶快动手吧! 处理对象:R-30iB-A型控制柜 该型号机器人控制柜大多是用于汽车零部件生产,主要应用为点焊应用,现 ...[查看全文]
-
 发那科FANUC机器人长期停机后恢复运行的注意事项
2020-03-21 机器人保养
发那科FANUC机器人长期停机后恢复运行的注意事项
2020-03-21 机器人保养目前各行各业正在组织复工复产,为了帮助假期中发那科机器人等设备运行停止的客户快速恢复生产,特分享发那科机器人恢复使用前相关的注意事项。发那科机器人在长期切断电源后,初次开机使用时需充分确认现场条件后再投入运转,避免因操作不当引起设备的故障 ...[查看全文]
-
 FANUC发那科机器人点检保养日常安全检查
2020-01-03 机器人保养
FANUC发那科机器人点检保养日常安全检查
2020-01-03 机器人保养设备正常的安全机构是保证人身安全的前提,安全机构检查应纳入日常点检范围内,机器人安全使用要遵循以下原则:不随意短接、不随意改造、不随意拆除、操作的规范。具体检查项目如下: 1.机器人紧急停止按钮的检查,包括控制柜急停开关和手持操作盒急停开关。 ...[查看全文]
-
 FANUCR2000iB发那科机器人保养有哪些
2019-12-09 机器人保养
FANUCR2000iB发那科机器人保养有哪些
2019-12-09 机器人保养1.机器人保养的重要性 机器人都需要预防性保养,这样可以保证它们在生产线上保持最佳性能和实现一致性。当机器人没有进行定期的预防性保养检查,可能会导致零部件损坏或故障,从而致使生产放慢甚至停机。对机器人的正确保养可能会延长其寿命多年甚至数十年, ...[查看全文]
-
 FANUC发那科机器人保养及零点校正方法
2019-12-04 码垛机器人保养
FANUC发那科机器人保养及零点校正方法
2019-12-04 码垛机器人保养那科FANUC机器人保养 一、发那科FANUC机器人机械手机器人轴: 二发那科FANUC机器人齿轮箱: 三、发那科FANUC机器人电缆状态:信号电缆,动力电缆,用户电缆,底电缆,立臂电缆。 四、发那科FANUC机器人固定状态: 五、发那科FANUC机器人电池:机器人本体电池 ...[查看全文]
-
发那科机器人常见异常报警及处理2019-11-16 码垛机器人保养
以下为常见机器人异常报警信号及简单处理方式。 报警代码 报警信息描述 原因及消除 SRVO-001 SERVO Operator panel E stop 机器人控制器控制操作面板上紧急停止按钮按下。 复位紧急停止按钮, RESET 复位。 SRVO-002 SERVO Teach pendant E stop 机器人TP 示 ...[查看全文]
-
 FANUC机器人哪些情问下需校正零点(零位),校正方式有哪些
2019-11-16 码垛机器人保养
FANUC机器人哪些情问下需校正零点(零位),校正方式有哪些
2019-11-16 码垛机器人保养在如下情况下必须进行零点校正, 1:机器人执行了初始化启动。 2:SRAM电池(主板)电池电压下降导致mastering 数据丢失 3:SPC(轴编码器)备份电池电压下降导致脉冲计数丢失 4:在关机的情况下卸下电池盒子 5:编码器电源线断开 6:更换编码器 其中MASTERI ...[查看全文]
-
 发那科FANUC机器人怎么配置IO
2019-11-16 码垛机器人保养
发那科FANUC机器人怎么配置IO
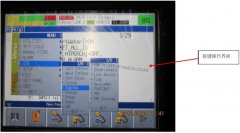
2019-11-16 码垛机器人保养FANUC 机器人 IO 配置说明 一、前提条件 1、此操作配置IO说明仅适用于FANUC 机器人。 二、配置步骤 1、按照图示按键操作进入IO 界面 2、按F2(CONFIG) 定义按钮进入配置界面 4、配置IO 四、注意事项 1、当需要定义的Profibus IO 口超过8 个字节(随厂默认配置 ...[查看全文]
-
 FANUC发那科机器人安装照相机的方式
2019-11-16 焊接机器人保养
FANUC发那科机器人安装照相机的方式
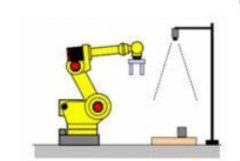
2019-11-16 焊接机器人保养iRVision 支持以下的照相机安装方式: 固定照相机(fixed camera) 优势:可以在机器人运动时照相。 照相机连接电缆铺设简易化。 可以使用Tool frame offset 。 劣势:检测区域固定化。 如果因外界因素导致照相机和机器人间相对位置变更, 必须重新示教camera ...[查看全文]
-
 FANUC发那科机器人有哪些动作指令
2019-07-27 焊接机器人保养
FANUC发那科机器人有哪些动作指令
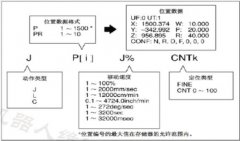
2019-07-27 焊接机器人保养动作指令 所谓动作指令, 是指以指令的移动速度和移动方法使机器人向作业空间内的指定位置移动的 指令,动作指令中指定的内容如下。 1、动作类型-指定向指定位置的轨迹控制。 2、位置数据-对机器人将要移动的位置进行示教。 3、移动速度-指定机器人的移动速 ...[查看全文]
-
 什么是发那科机器人坐标系
2019-07-26 焊接机器人保养
什么是发那科机器人坐标系
2019-07-26 焊接机器人保养坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。坐标系有关节坐标系、 关节坐标系关节坐标系是设定在机器人的关节中的坐标系。关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。 下图中的关节坐 ...[查看全文]
-
 发那科FANUC机器人R-2000iB机器人的三年保养的操作流程
2019-07-16 码垛机器人保养
发那科FANUC机器人R-2000iB机器人的三年保养的操作流程
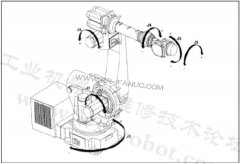
2019-07-16 码垛机器人保养FANUC发那科机器人使用运行时间长了要定期做保养,下面放出R-2000iB机器人的三年保养的操作流程,了解以下详细教程,以后也可以自己保养啦! 保养周期 : 1. 当正常使用的机器人运行时间达到1万小时或使用3年时需要更换本体减速机内部润滑油,根据机器人实际 ...[查看全文]
-
 FANUC发那科机器人工具坐标系的设置与使用三点示教法
2019-07-13 搬运机器人保养
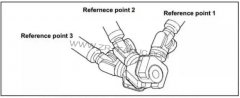
FANUC发那科机器人工具坐标系的设置与使用三点示教法
2019-07-13 搬运机器人保养三点示教法( TCP自动设定 ) 设定工具中心点(工具坐标系的x、y、z)。进行示教,使参考点1、2、3以不同的姿势指向一点。由此自动计算TCP的位置。要进行正确的设定,应尽量使三个趋近方向各不相同。 具体步骤: 1. 按下 [MENU] (菜单)键,显示出画面菜单 ...[查看全文]
-
 发那科机器人设备搬迁,工厂工业机器人搬家有哪些注意事项
2018-06-01 搬运机器人保养
发那科机器人设备搬迁,工厂工业机器人搬家有哪些注意事项
2018-06-01 搬运机器人保养随着科技的进步,工业机器人在越来越多的行业开始普及起来,渐渐代替了人类进行一些劳力重复操作的工资。目前,我国的工业机器人数量正以飞快的速度在增长,许多企业都引进了工业机器人生产和工作。 随着企业的发展扩大,避免不了要搬厂迁移公司,其中涉及关 ...[查看全文]
-
 发那科机器人搬迁工厂生产线设备批量转移
2018-05-25 搬运机器人保养
发那科机器人搬迁工厂生产线设备批量转移
2018-05-25 搬运机器人保养工厂搬迁是个大工程,面对一排排的工业机器人,如何把他们拆卸下来、打包好,运输再到安装调试,这是个大难题,不仅需要过硬的技术支持,还需要专业的团队协力合作。广州子锐机器人技术有限公司拥有一支技术过硬,服务专业的团队,为您提供专业的机器人位移 ...[查看全文]

