发那科FANUC蜘蛛手机器人保养
时间:2025-08-28 来源:互联网 阅读次数:
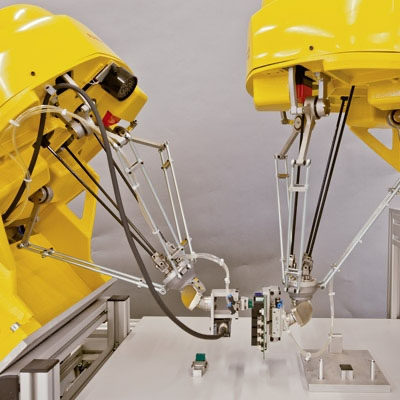
发那科FANUC蜘蛛手机器人采用并联多臂结构,主打高速分拣、精密装配作业,多臂协同运动能实现毫秒级物料转移,长期高频运行易出现臂间同步偏差、末端执行器磨损或并联关节润滑衰减,发那科机器人保养需贴合其高速协同特性,兼顾机械同步性与动作精度稳定性。……
发那科FANUC蜘蛛手机器人采用并联多臂结构,主打高速分拣、精密装配作业,多臂协同运动能实现毫秒级物料转移,长期高频运行易出现臂间同步偏差、末端执行器磨损或并联关节润滑衰减,发那科机器人保养需贴合其高速协同特性,兼顾机械同步性与动作精度稳定性。
并联臂同步维护需优先开展。通过示教器启动臂间同步测试程序,让各机械臂执行相同轨迹运动,观察运动过程中臂间间距是否一致,若出现轻微错位,需进入参数界面调整各臂运动补偿值,确保多臂在任意位置都保持预设间距。检查各臂连接底座的紧固螺栓,用扭矩扳手按技术手册标注力矩复紧,螺栓松动易导致臂间同步偏差扩大,复紧前需清理螺栓表面油污,避免力矩传递偏差。并联臂同步性检查需搭配专用校准工具,避免仅凭视觉判断导致误差。
末端执行器养护需适配高频抓取需求。蜘蛛手机器人常用真空吸盘或多爪夹爪作为末端执行器,发那科机器人保养时需先检查吸盘密封性,将吸盘贴合光滑测试板,启动真空系统后观察真空表读数,若压力下降过快,需更换老化吸盘或清理吸盘内侧异物;夹爪类执行器需检查爪指磨损程度,爪指内侧防滑纹磨平时需及时更换,避免抓取时物料滑落。清洁末端执行器连接法兰,用中性清洁剂擦拭残留的物料碎屑或胶黏剂,擦拭后用干布吸干水分,防止清洁剂渗入法兰密封槽,影响连接密封性。
并联关节润滑需控制精度与剂量。蜘蛛手机器人的并联关节数量多且运动轨迹复杂,按技术手册标注的润滑点逐一注脂,选用高抗磨性润滑脂,用微型注脂枪缓慢加注,每处注脂量严格控制在 0.5-1ml(具体按型号标注),过多油脂易因高速运动飞溅,污染物料或影响传感器检测。注脂后手动驱动各关节做小范围运动,确保油脂均匀覆盖轴承滚道,再启动空载运行 10 分钟,让润滑脂充分渗透至关节啮合面。针对运动频率最高的中间关节,需适当缩短润滑间隔,避免因润滑不足导致关节过热。
同步控制器与电气系统养护需保障信号稳定。打开控制柜,用压缩空气轻柔吹扫同步控制器表面粉尘,不可直接对准控制器接口吹扫,防止粉尘进入内部影响信号传输;检查控制器与各机械臂的连接线缆,线缆接头处需用绝缘胶带包裹加固,避免高速运动导致接头松动。测试各臂电机的电流反馈信号,通过示教器查看电流波形,若波形出现异常波动,需检查电机编码器连接状态,编码器线缆屏蔽层破损时需重新包裹,确保信号无干扰。
功能验证需模拟实际作业场景。发那科机器人保养后加载标准重量物料(约为额定负载的 60%),执行高频分拣测试,记录多臂协同的物料转移效率与准确率,若出现物料抓取偏移,需重新校准末端执行器定位参数;测试连续运行 1 小时后的臂间同步性,再次启动同步测试程序,确认无偏差扩大现象。检查各关节运行温度,用红外测温仪测量关节表面温度,确保不超过技术手册限定值,温度过高需检查润滑脂是否变质或关节是否存在卡滞。
环境适配调整需结合作业场景。若机器人用于食品分拣车间,保养时需选用食品级润滑脂,避免油脂污染物料;用于电子元件分拣时,需每周用防静电抹布清洁各臂表面,防止静电吸附粉尘影响动作精度。闲置超过 3 天的机器人,重启前需执行臂间同步预启动程序,让各臂低速运行 5 分钟,再进入正常作业模式,避免长期静置导致关节润滑脂沉降。发那科机器人保养需避免通用流程套用,需根据蜘蛛手机器人的并联结构特性调整细节,确保保养后设备能持续保持高速协同的作业性能。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
相关资讯
- fanuc发那科机器人伺服电机刹车异常维修(2025-08-28)
- 发那科机器人保养后验收标准(2025-04-23)
- fanuc发那科机器人的基础检查与保养(2025-03-28)
- 发那科机器人减速机保养:守护精密传动(2025-03-06)
- FANUC发那科M-70iC搬运机器人维修保养攻略分享(2024-04-10)
- FANUC发那科P-50iB喷涂机器人维修保养策略(2024-04-10)

声明:本站提及的品牌仅用于说明维修机型,本公司未获得品牌授权,非官方授权售后。子锐机器人是一家独立的第三方机器人技术服务商,为客户提供更高效率、更优成本、更全服务的选择。
