ЕкШ§ЗНЛњЦїШЫЮЌаоММЪѕЗўЮёЩЬ
ШШУХЙиМќДЪЃК
ЁЁfanuc ЁЁЗЂФЧПЦ ЁЁЮЌао ЁЁЛњаЕЪж ЁЁЫХЗўЕчЛњ ЁЁЪОНЬЦїЮЌао ЁЁМѕЫйЦїЮЌао ЁЁЪОНЬЦї ЁЁЛњЦїШЫ ЁЁЯЕЭГ ЁЁМѕЫйЦїЮЌао ЁЁМѕЫйЦї ЁЁПижЦЙё ЁЁЗЂФЧПЦЕчЛњ ЁЁЫХЗўЗХДѓЦї ЁЁ
ФњЯждкЕФЮЛжУЪЧЃКЪзвГ > ЛњЦїШЫБЃбј > >fanucЗЂФЧПЦЛњЦїШЫЫХЗўЕчЛњЩВГЕвьГЃЮЌао
fanucЗЂФЧПЦЛњЦїШЫЫХЗўЕчЛњЩВГЕвьГЃЮЌао
ЪБМфЃК2025-08-28 РДдДЃКЛЅСЊЭј дФЖСДЮЪ§ЃК
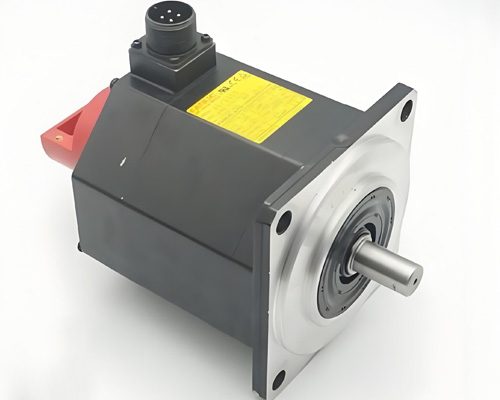
fanucЗЂФЧПЦЛњЦїШЫЫХЗўЕчЛњЩВГЕвьГЃЪЧгАЯьЩшБИАВШЋгыдЫааЮШЖЈЕФживЊЮЪЬтЁЃе§ГЃзДЬЌЯТЃЌЕчЛњЖЯЕчКѓЩВГЕЛњЙЙгІСЂМДЫјЫРзЊзгЃЌЗРжЙжсВПвђжиСІЛђЭтСІВњЩњЮЛвЦЁЃЕБЩВГЕЪЇаЇЛђЯьгІГйжЭЃЌЛњЦїШЫдкОВжЙЪБПЩФмГіЯжЛКТ§ЯТЛЌЃЌгШЦфдкJ1ЁЂJ2ЕШГадиНЯДѓЕФжсЩЯБэЯжУїЯдЁЃЁЁ
fanucЗЂФЧПЦЛњЦїШЫЫХЗўЕчЛњЩВГЕвьГЃЪЧгАЯьЩшБИАВШЋгыдЫааЮШЖЈЕФживЊЮЪЬтЁЃе§ГЃзДЬЌЯТЃЌЕчЛњЖЯЕчКѓЩВГЕЛњЙЙгІСЂМДЫјЫРзЊзгЃЌЗРжЙжсВПвђжиСІЛђЭтСІВњЩњЮЛвЦЁЃЕБЩВГЕЪЇаЇЛђЯьгІГйжЭЃЌЛњЦїШЫдкОВжЙЪБПЩФмГіЯжЛКТ§ЯТЛЌЃЌгШЦфдкJ1ЁЂJ2ЕШГадиНЯДѓЕФжсЩЯБэЯжУїЯдЁЃетРрЙЪеЯПЩФмДјРДЖЈЮЛЦЋВюЃЌЩѕжСв§ЗЂХізВЗчЯеЁЃ
МьВщЩВГЕЕчдДЪЧХХВщЕФЕквЛВНЁЃЫХЗўЕчЛњЩВГЕгЩ24VжБСїЙЉЕчЃЌЭЈЕчЪБЪЭЗХЃЌЖЯЕчЪББЇНєЁЃЗЂФЧПЦЛњЦїШЫЮЌаожаЪЙгУЭђгУБэВтСПЩВГЕЯпШІЪфШыЕчбЙЃЌШЗШЯдкЖЯЕчЫВМфЪЧЗёМАЪБЧаЖЯЁЃШєЕчбЙбгГйЯћЪЇЃЌПЩФмЪЧЧ§ЖЏЦїФкВПМЬЕчЦїеГСЌЛђЭтВППижЦЛиТЗЙЪеЯЁЃгаЪБКђМЬЕчЦїДЅЕуРЯЛЏЃЌЕМжТЪЭЗХВЛГЙЕзЃЌЩВГЕЮоЗЈЭъШЋЫјЫРЁЃМьВщЯрЙиЖЫзгНгЯпЪЧЗёЫЩЖЏЃЌМЬЕчЦїЖЏзїЩљвєЪЧЗёЧхЮњЃЌгажњгкХаЖЯЮЪЬтЫљдкЁЃ
ЩВГЕЛњЙЙБОЩэЕФзДЬЌвВашЦРЙРЁЃГЄЪБМфдЫааКѓЃЌЩВГЕЦЌПЩФмФЅЫ№ЃЌЕМжТМфЯЖЙ§ДѓЃЌжЦЖЏСІЯТНЕЁЃВПЗжЕчЛњЩшМЦгаЪжЖЏЪЭЗХзАжУЃЌПЩгУгкМьВтЩВГЕЫЩНєЖШЁЃЭЈЙ§ЪжЖЏа§зЊжсЙлВьзшСІБфЛЏЃЌШєЪЭЗХКѓзЊЖЏЫГГЉЃЌЕЋЖЯЕчКѓзшСІЦЋаЁЃЌПЩФмЮЊЩВГЕСІВЛзуЁЃВ№НтМьВщашзЈвЕШЫдБВйзїЃЌБмУтЫ№ЛЕУмЗтНсЙЙЁЃгаЪБКђЛвГОЛђгЭЮлНјШыЩВГЕХЬМфЯЖЃЌгАЯьФІВСаЇЙћЃЌЧхНрКѓПЩЛжИДадФмЁЃ
ЗЂФЧПЦЛњЦїШЫЮЌаоЙ§ГЬжаЃЌашЙизЂПижЦаХКХТпМЁЃЩВГЕЖЏзїгЩЯЕЭГГЬађПижЦЃЌгыЫХЗўЪЙФмаХКХСЊЖЏЁЃМьВщI/OМрПиНчУцЃЌШЗШЯ“ЩВГЕЪЭЗХ”ЪфГіаХКХЪЧЗёгыЪЙФмзДЬЌЦЅХфЁЃШєГЬађЮѓЪфГіЛђаХКХИЩШХЕМжТЩВГЕвьГЃПЊЦєЃЌЕчЛњПЩФмдкЮДзМБИОЭаїЪБЫЩПЊЁЃХХВщЭтВПPLCЛђАВШЋЛиТЗЪЧЗёЮѓДЅЗЂЃЌЗРжЙПижЦТпМЛьТвЁЃ
ВПЗжвьГЃгыЕчЛњБрТыЦїЗДРЁгаЙиЁЃЩВГЕЮДЭъШЋЪЭЗХЪБЧПааЦєЖЏЃЌПЩФмЕМжТЕчЛњИКдиЩ§ИпЃЌЯЕЭГБЈЙ§диЛђеёЖЏОЏБЈЁЃДЫЪБЪОНЬЦїПЩФмЮДжБНгЬсЪОЩВГЕЙЪеЯЃЌашНсКЯдЫааЯжЯѓзлКЯХаЖЯЁЃгаЪБКђЩВГЕЪЭЗХВЛГЙЕзЃЌЕчЛњдЫааЪБЗЂГіЕЭЦЕвьЯьЃЌГжајдЫааПЩФмЫ№ЩЫжсГаЛђМѕЫйЛњЁЃ
ЗЧзЈвЕШЫдБВЛвЫЫцвтЕїећЩВГЕМфЯЖЛђИќЛЛФкВПСуМўЁЃВЛЭЌаЭКХЕчЛњЕФЩВГЕХЄОиКЭНсЙЙДцдкВювьЃЌЗЂФЧПЦЛњЦїШЫЮЌаоашВЮееММЪѕЪжВсЁЃИќЛЛЩВГЕзщМўКѓЃЌгІНјааИКдиВтЪдЃЌШЗШЯЫјжЙПЩППЃЌЪЭЗХГЙЕзЁЃ
ЛЗОГвђЫиЛђаэгагАЯьЁЃИпЪЊЖШЛЗОГЯТЃЌЩВГЕЯпШІПЩФмЪмГБЃЌЕМжТОјдЕЯТНЕЛђЖЏзїГйЛКЁЃЗлГОНЯЖрЕФГЕМфЃЌПХСЃЮяНјШыЩВГЕЛњЙЙЃЌПЩФмМгЫйФЅЫ№ЛђгАЯьЯьгІЫйЖШЁЃЖЈЦкМьВщЕчЛњАВзАНЧЖШгыЗРЛЄзДЬЌЃЌБЃГждЫааЛЗОГЧхНрЃЌгажњгкбгГЄЩВГЕЪйУќЁЃ
ЗЂФЧПЦЛњЦїШЫЮЌаоВЛжЛЪЧДІРэЙЪеЯЃЌИќашЗжЮіГЩвђЁЃЩВГЕвьГЃПЩФмдДгкЕчЦјЁЂЛњаЕЛђПижЦЖрЗНУцвђЫиЁЃМЧТМУПДЮЙЪеЯЗЂЩњЪБЕФВйзїзДЬЌЁЂБЈОЏаХЯЂКЭЮЌЛЄМЧТМЃЌгажњгкЛ§РлОбщЁЃгЩЪьЯЄЩшБИЬиадЕФММЪѕШЫдБДІРэЃЌПЩЬсИпеяЖЯзМШЗадЁЃЙцЗЖВйзїСїГЬЃЌЖЈЦкМьВщЙиМќВПМўЃЌФмгааЇНЕЕЭДЫРрЮЪЬтЗЂЩњИХТЪЁЃ
ЮЪЬтЛђаэМђЕЅЃЌвВПЩФмЩцМАЖрИіЛЗНкЁЃАДВНжшХХВщЃЌБмУтУЄФПИќЛЛВПМўЃЌВХФмШЗБЃЩшБИАВШЋЮШЖЈдЫааЁЃ
Утд№ЩљУїЃКБОЭјВПЗжЮФеТКЭаХЯЂРДдДгкЛЅСЊЭјЃЌБОЭјзЊдиГігкДЋЕнИќЖраХЯЂКЭбЇЯАжЎФПЕФЁЃШчзЊдиИхЩцМААцШЈЕШЮЪЬтЃЌЧыСЂМДСЊЯЕЭјеОЫљгаШЫЃЌЮвУЧЛсгшвдИќИФЛђЩОГ§ЯрЙиЮФеТЃЌБЃжЄФњЕФШЈРћЁЃ
ЩЯвЛЦЊЃКFANUCЛњЦїШЫЕФдЄЗРадБЃбјжИФЯ
ЯТвЛЦЊЃКЗЂФЧПЦFANUCжЉжыЪжЛњЦїШЫБЃбј
ЯрЙизЪбЖ
- ЗЂФЧПЦFANUCжЉжыЪжЛњЦїШЫБЃбј(2025-08-28)
- ЗЂФЧПЦЛњЦїШЫБЃбјКѓбщЪеБъзМ(2025-04-23)
- fanucЗЂФЧПЦЛњЦїШЫЕФЛљДЁМьВщгыБЃбј(2025-03-28)
- ЗЂФЧПЦЛњЦїШЫМѕЫйЛњБЃбјЃКЪиЛЄОЋУмДЋЖЏ(2025-03-06)
- FANUCЗЂФЧПЦM-70iCАсдЫЛњЦїШЫЮЌаоБЃбјЙЅТдЗжЯэ(2024-04-10)
- FANUCЗЂФЧПЦP-50iBХчЭПЛњЦїШЫЮЌаоБЃбјВпТд(2024-04-10)
ЭЦМіФкШн
- ЗЂФЧПЦFANUCЛњЦїШЫA05B-2301-C335ЪОНЬЦїЮЌао
- ЗЂФЧПЦАсдЫЛњЦїШЫM-2000iAЮоЗЈПижЦВйзїЃЈОЏБЈ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїA05B-2255-C101НєМБМБЭЃЙЪ
- ЗЂФЧПЦКИНгЛњЦїШЫЩаЮДСЌНсКИЧЙЪБжДааСЫСЌНсжИ
- ЗЂФЧПЦКИНгЛњЦїШЫдкгІгУжаГЃМћЕФЙЪеЯМАНтОіДы
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїУцАхНєМБЭЃЛњЃЈОЏБЈ001ЃЉ
- ЗЂФЧПЦЛњЦїШЫПижЦУцАхЕчТЗАхЮоСЌНгаХКХЃЈОЏБЈ
- ЗЂФЧПЦЛњЦїШЫЪОНЬЦїЦСФЛЪЇСщДЅУўЮоЗДгІШчКЮНт
- зюаТЗЂФЧПЦЛњЦїШЫJ2жсМѕЫйЦїИќЛЛСїГЬЁОЭМЮФЯъ
- ЫХЗўЕчЛњБЈОЏаХКХ046ЕФдвђМАНтОіЗНЗЈ
ШШЕуФкШн

- FANUCЗЂФЧПЦЛњЦїШЫЙЄОпзјБъЯЕЕФ
- ЗЂФЧПЦFANUCЛњЦїШЫдѕУДХфжУIO
- FANUCЛњЦїШЫФФаЉЧщЮЪЯТашаЃе§Су
- ЗЂФЧПЦЛЁКИЛњЦїШЫЭтВПНєМБЭЃжЙЯп
- ЗЂФЧПЦКИНгЛњЦїШЫЗжРыЫљСЌНсЕФКИ
- ЗЂФЧПЦЛњаЕЪжБЃбјЦЊжЎШчКЮИќЛЛЕч
- FANUCЗЂФЧПЦЛњЦїШЫгаФФаЉЖЏзїжИ
- ЗЂФЧПЦЛЁКИЛњЦїШЫБрГЬЙЪеЯШчКЮао
- ЗЂФЧПЦКИНгЛњЦїШЫКИЧЙжсвЦЖЏЮЛжУ
- ЗЂФЧПЦКИНгЛњЦїШЫдкгІгУжаГЃМћЕФ
ЩљУїЃКБОеОЬсМАЕФЦЗХЦНігУгкЫЕУїЮЌаоЛњаЭЃЌБОЙЋЫОЮДЛёЕУЦЗХЦЪкШЈЃЌЗЧЙйЗНЪкШЈЪлКѓЁЃзгШёЛњЦїШЫЪЧвЛМвЖРСЂЕФЕкШ§ЗНЛњЦїШЫММЪѕЗўЮёЩЬЃЌЮЊПЭЛЇЬсЙЉИќИпаЇТЪЁЂИќгХГЩБОЁЂИќШЋЗўЮёЕФбЁдёЁЃ
Copyright © ЙужнзгШёЛњЦїШЫММЪѕгаЯоЙЋЫОАцШЈЫљга ЕчЛАЃК15889988091 ЕижЗЃКЙужнЪаЗЌиЎЧјЖЋЛЗНжН№ЩНЙШДДвтАЫНж1КХ109 ICPЃКдСICPБИ15095857КХ-7
