-
 发那科工业机械手维修R-30iB控制柜
2025-01-04 发那科机器人维修
发那科工业机械手维修R-30iB控制柜
2025-01-04 发那科机器人维修还需要考虑环境因素对系统的影响。对于由于环境因素导致的故障,需要改善控制柜的工作环境。增加散热设施以提高系统的散热性能;采取防潮措施以防止系统受潮;定期清洁灰尘以保持系统的清洁度等。这些措施能够有效提高系统的稳定性和可靠性。 ...[查看全文]
-
 FANUC机械手R-1000iA减速机维修
2025-01-04 发那科机器人维修
FANUC机械手R-1000iA减速机维修
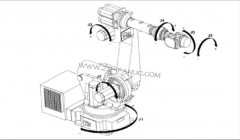
2025-01-04 发那科机器人维修当发现发那科机器人减速机轴承损坏时,应立即停止机器人的运行,避免进一步损坏或安全事故的发生。接下来,进行细致的FANUC机械手R-1000iA减速器故障分析,确认轴承损坏的具体程度和原因。可能的原因包括过载运行、润滑不良、安装不当或长期磨损等。 ...[查看全文]
-
 发那科机器人维修全面解析
2025-01-03 发那科机器人维修
发那科机器人维修全面解析
2025-01-03 发那科机器人维修随着时间的推移,可能会遇到一些法兰克机械手减速机故障,比如齿轮磨损、轴承损坏等等。别担心,我来给你揭秘常见的发那科机器人维修方法,让你的机器人重新焕发活力! ...[查看全文]
-
 FANUC机器人维修驱动器的秘籍
2025-01-03 驱动器维修
FANUC机器人维修驱动器的秘籍
2025-01-03 驱动器维修发那科机器人驱动器的核心作用是通过控制伺服电机实现高精度的运动控制。FANUC工业机械臂驱动器,也被称为伺服控制器或伺服放大器,通过位置、速度和力矩三种方式对伺服电机进行控制,确保机器人动作的精准和高效。 ...[查看全文]
-
 发那科机器人平衡缸维修具体细节
2025-01-03 发那科机器人维修
发那科机器人平衡缸维修具体细节
2025-01-03 发那科机器人维修FANUC机器人平衡缸是工业自动化领域中用于维持机械手运动稳定性和平衡性的重要组成部分。 通过动态平衡机器人臂部的重量,确保机器人在各种姿态下都能轻松、精准地完成复杂动作。 ...[查看全文]
-
 法那科机械手示教器维修无法启动故障_修复
2025-01-03 示教器维修
法那科机械手示教器维修无法启动故障_修复
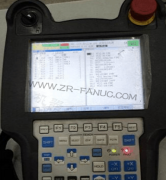
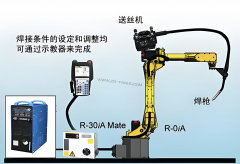
2025-01-03 示教器维修示教操作盘是主管应用工具软件与用户之间的接口的操作装置。示教操作盘经由电缆与控制装置内部的主 CPU印刷电路板和发那科机械臂控制印刷电路板连接。示教操作盘在进行如下操作时使用。 ● 机器人的 JOG进给 ● 程序创建 ...[查看全文]
-
 法那科机器人M-20iA示教器通电不显示维修问题分析
2025-01-03 示教器维修
法那科机器人M-20iA示教器通电不显示维修问题分析
2025-01-03 示教器维修发那科(FANUC)机器人以其卓越的性能和可靠性在全球范围内广受赞誉,但任何设备在长期使用中都可能出现故障。当你的发那科机器人示教器通电后无显示时,这可能是操作中遇到的一个常见的FANUC机械臂示教盒通电无显示故障问题。 ...[查看全文]
-
 FANUC机械手三轴减速机A97L-0218-088维修概述
2025-01-03 发那科机器人维修
FANUC机械手三轴减速机A97L-0218-088维修概述
2025-01-03 发那科机器人维修在工业自动化领域,发那科(FANUC)机器人以其高精度、高可靠性和卓越的性能而著称。然而,就像任何复杂的机械设备一样,也可能遇到各种FANUC机械臂减速器故障,其中之一便是减速器漏油问题。 ...[查看全文]
-
 Fanuc机器人R-1000iA/80H维修驱动器故障现象检查
2025-01-03 驱动器维修
Fanuc机器人R-1000iA/80H维修驱动器故障现象检查
2025-01-03 驱动器维修发那科机器人作为工业自动化领域的佼佼者,其稳定性和可靠性备受赞誉。然而,在长时间的使用过程中,驱动器作为核心部件之一,难免会出现各种FANUC工业机械手驱动器故障。 ...[查看全文]
-
 FANUC发那科机器人驱动器过流维修
2025-01-03 发那科机器人维修
FANUC发那科机器人驱动器过流维修
2025-01-03 发那科机器人维修过流故障原因分析,负载过重:伺服驱动器需要驱动的设备可能由于某种原因,如设计缺陷、装配不当或负载增加,导致实际负载超过伺服驱动器的承受能力,从而引发过流故障。 ...[查看全文]
-
 Fanuc M-2000iA/1200搬运机器人维修快速解决
2025-01-03 发那科机器人维修
Fanuc M-2000iA/1200搬运机器人维修快速解决
2025-01-03 发那科机器人维修在确定了刹车故障的具体类型后,便可以着手进行维修。发那科机器人维修过程主要包括故障诊断、断电检查、拆卸检查、清洗与检查以及更换损坏部件等步骤。在故障诊断阶段,需要通过观察电机的运行状态、听取异常声音、检测电机温度等方式来初步判断故障类型。在 ...[查看全文]
-
 FANUC机械手R-30iA控制柜维修三步骤
2025-01-02 发那科机器人维修
FANUC机械手R-30iA控制柜维修三步骤
2025-01-02 发那科机器人维修发那科机器人作为工业自动化领域的佼佼者,其控制柜作为核心部件,承载着控制、驱动和通信等重要功能。然而,长时间运行或不当操作可能导致FANUC机械手控制柜故障,影响机器人的正常运行。 一、控制柜无法启动 故障现象:发那科工业机械臂R-30iA控制柜通电 ...[查看全文]
-
 法那科机器人R-J3iB示教器维修方法合集
2025-01-02 示教器维修
法那科机器人R-J3iB示教器维修方法合集
2025-01-02 示教器维修当你按下这个键时,系统会提供关于如何使用当前屏幕的信息,这对于初学者来说无疑是一个极大的帮助。还可以使用DIAGnostics键来显示更为详细的信息,如报警信息的具体说明、起因以及纠正办法。这些信息对于快速定位和解决系统问题至关重要。 ...[查看全文]



