您现在的位置是:
-
 FANUC发那科机器人安装照相机的方式
2019-11-16 焊接机器人保养
FANUC发那科机器人安装照相机的方式
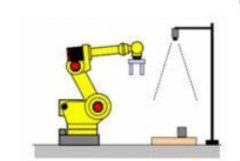
2019-11-16 焊接机器人保养iRVision 支持以下的照相机安装方式: 固定照相机(fixed camera) 优势:可以在机器人运动时照相。 照相机连接电缆铺设简易化。 可以使用Tool frame offset 。 劣势:检测区域固定化。 如果因外界因素导致照相机和机器人间相对位置变更, 必须重新示教camera ...[查看全文]
-
 发那科FANUC机器人怎么配置IO
2019-11-16 码垛机器人保养
发那科FANUC机器人怎么配置IO
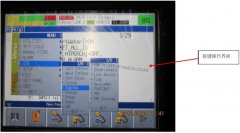
2019-11-16 码垛机器人保养FANUC 机器人 IO 配置说明 一、前提条件 1、此操作配置IO说明仅适用于FANUC 机器人。 二、配置步骤 1、按照图示按键操作进入IO 界面 2、按F2(CONFIG) 定义按钮进入配置界面 4、配置IO 四、注意事项 1、当需要定义的Profibus IO 口超过8 个字节(随厂默认配置 ...[查看全文]
-
 发那科FANUC机器人控制柜常见故障问题检测
2019-11-16 电路板维修
发那科FANUC机器人控制柜常见故障问题检测
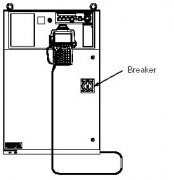
2019-11-16 电路板维修检查及维修 控制器部件 检查1:控制器断路器开且没有跳闸 维修: 合上断路器 检查 2:查看电源板(PSU)上的LED指示 灯(GREEN)是否亮。 维修: 如果 LED指示灯没亮可能是PSU 的200V供电电源没有或PSU上的F1保险丝毁坏: 1如果200V电源没有请检查供电 线路 ...[查看全文]
-
 发那科FANUC机器人怎么创建程序
2019-11-16 示教器维修
发那科FANUC机器人怎么创建程序
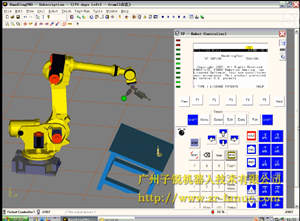
2019-11-16 示教器维修程序创建 记录程序记录程序录时,创建一个新的空程序。 设定程序详细信息设定程序详细信息时,设定程序的属性。 修改标准指令语句修改标准指令语句时,重新设定动作指令的示教时要使用的标准指令。 示教动作指令示教动作指令时,对动作指令和动作附加指令进 ...[查看全文]
-
 FANUC发那科机器人有哪些动作指令
2019-07-27 焊接机器人保养
FANUC发那科机器人有哪些动作指令
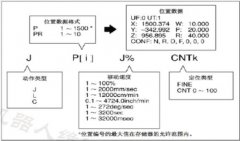
2019-07-27 焊接机器人保养动作指令 所谓动作指令, 是指以指令的移动速度和移动方法使机器人向作业空间内的指定位置移动的 指令,动作指令中指定的内容如下。 1、动作类型-指定向指定位置的轨迹控制。 2、位置数据-对机器人将要移动的位置进行示教。 3、移动速度-指定机器人的移动速 ...[查看全文]
-
 发那科FANUC机器人R-2000iB机器人的三年保养的操作流程
2019-07-16 码垛机器人保养
发那科FANUC机器人R-2000iB机器人的三年保养的操作流程
2019-07-16 码垛机器人保养FANUC发那科机器人使用运行时间长了要定期做保养,下面放出R-2000iB机器人的三年保养的操作流程,了解以下详细教程,以后也可以自己保养啦! 保养周期 : 1. 当正常使用的机器人运行时间达到1万小时或使用3年时需要更换本体减速机内部润滑油,根据机器人实际 ...[查看全文]
-
 FANUC发那科机器人工具坐标系的设置与使用三点示教法
2019-07-13 搬运机器人保养
FANUC发那科机器人工具坐标系的设置与使用三点示教法
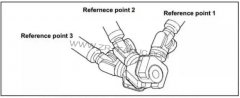
2019-07-13 搬运机器人保养三点示教法( TCP自动设定 ) 设定工具中心点(工具坐标系的x、y、z)。进行示教,使参考点1、2、3以不同的姿势指向一点。由此自动计算TCP的位置。要进行正确的设定,应尽量使三个趋近方向各不相同。 具体步骤: 1. 按下 [MENU] (菜单)键,显示出画面菜单 ...[查看全文]
-
 FANUC推出新品喷涂机器人P-40iA
2019-09-26 发那科资讯
FANUC推出新品喷涂机器人P-40iA
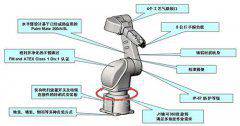
2019-09-26 发那科资讯FANUC推出新品喷涂机器人P-40iA 2017年年末,在上海发那科二十周年暨新产品新技术展示会上,FANUC在中国地区首次推出紧凑型喷涂机器人――P-40iA。 在一般行业喷涂应用中,如3C、汽车零部件等行业,要求机器人具有较大的可达半径,以适应变化多样的工件外形 ...[查看全文]
-
 FANUC荣获大众集团年度最佳供应商
2019-10-25 发那科资讯
FANUC荣获大众集团年度最佳供应商
2019-10-25 发那科资讯FANUC荣获大众集团年度最佳供应商 2018年5月24日,德国汽车制造商大众集团举行了年度最佳供应商颁奖典礼。大众集团总裁Herbert Diess、保时捷总裁Oliver Blume以及奥迪总裁Rupert Stadler,以及来自26个国家的约280名嘉宾出席了仪式。 大众集团今年从全球表 ...[查看全文]
-
FANUC首秀青岛 看机床技术发展的三大趋势2018-09-11 发那科资讯
FANUC首秀青岛 看机床技术发展的三大趋势 8月2日-8月6日,FANUC将携机床行业领先的解决方案亮相青岛国际机床展,并重点诠释当前机床技术发展的三大趋势,都有哪些亮点?快与小编一起来了解一下吧! 趋势一:自动化 将智能制造设备与自动化及无人技术结合,从 ...[查看全文]


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7