FANUC机器人维修驱动器的秘籍
时间:2025-01-03 来源:互联网 阅读次数:
发那科机器人驱动器的核心作用是通过控制伺服电机实现高精度的运动控制。FANUC工业机械臂驱动器,也被称为伺服控制器或伺服放大器,通过位置、速度和力矩三种方式对伺服电机进行控制,确保机器人动作的精准和高效。……
亲爱的朋友们,你们好啊!今天,要和大家分享一篇关于发那科机器人驱动器维修的秘籍。这可是小编积累了机器人维修经验得来的,要认认真真看哦!
发那科机器人驱动器的核心作用是通过控制伺服电机实现高精度的运动控制。FANUC工业机械臂驱动器,也被称为伺服控制器或伺服放大器,通过位置、速度和力矩三种方式对伺服电机进行控制,确保机器人动作的精准和高效。
先来点有营养的“发那科机器人维修”
什么是关节坐标系呢?
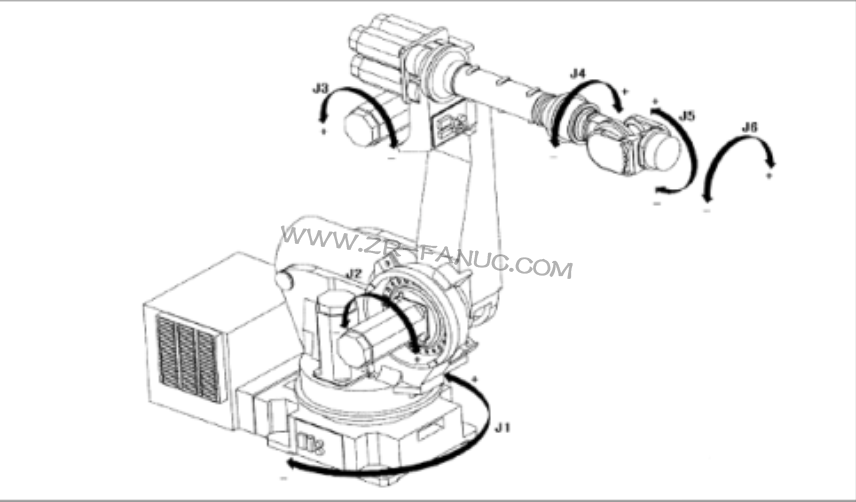
坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。坐标系有关节坐标系、关节坐标系是设定在机器人的关节中的坐标系。关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。下图中的关节坐标系的关节值,处在所有轴都为 0°的状态。
什么是刀具坐标系呢?
这是用来定义刀尖点(TCP)的位置和刀具姿势的坐标系。刀具坐材系必须事先进行设定.位定义时。将由机械接口坐标系代替刀具坐标系。
 子锐机器人常见发那科机器人维修驱动器型号有:fanuc机械臂驱动器A06B-6111-H026维修,法兰克工业机器人驱动器A06B-6079-H201维修,法那科机械手驱动器A06B-6066-H004 H006 H01维修等。
子锐机器人常见发那科机器人维修驱动器型号有:fanuc机械臂驱动器A06B-6111-H026维修,法兰克工业机器人驱动器A06B-6079-H201维修,法那科机械手驱动器A06B-6066-H004 H006 H01维修等。
fanuc机器人维修的步骤有点长,注意看哦!
· 记录一下报警代码:
观察机器人示教器的操作界面,记录下法兰克机械臂驱动器报警代码。这些代码是诊断问题关键的线索来的。
· 外面的检查:
看看驱动器外表是不是有明显的损坏或是异常,例如看看电源线、信号线是不是完好无损,接口是否松动或损坏等。
· 电源与连接检查:
检查一下法那科机械手电源线的连接牢不牢固,确保没有老化或是破损的现象。
使用万用表等检查工具,查看电源电压在不在正常范围数值内。
确保机器人和控制器之间的连接稳固,并检查电缆连接器有没有插紧。
 · fanuc机械臂电机与机器人驱动器的检查:
· fanuc机械臂电机与机器人驱动器的检查:
用温度计和万用表等等的工具来监测电机和驱动器的温度及电压。
如果发现驱动器温度太高或是电压出现异常,应该立即停机检查散热系统和电源系统。
· 更换损坏部件:
根据发那科工业机械手故障诊断的结果,更换坏了的机械手驱动器部件或是电路板。不过要确保更换的部件与原始部件兼容,并符合标准。
· 功能测试:
在发那科机器人维修完成后,对机器人进行功能测试,确保驱动器正常工作。验证机器人的运动精度、速度和稳定性等性能指标能不能满足要求。
发那科机器人驱动器的核心作用是通过控制伺服电机实现高精度的运动控制。FANUC工业机械臂驱动器,也被称为伺服控制器或伺服放大器,通过位置、速度和力矩三种方式对伺服电机进行控制,确保机器人动作的精准和高效。
先来点有营养的“发那科机器人维修”
什么是关节坐标系呢?
坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。坐标系有关节坐标系、关节坐标系是设定在机器人的关节中的坐标系。关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。下图中的关节坐标系的关节值,处在所有轴都为 0°的状态。
什么是刀具坐标系呢?
这是用来定义刀尖点(TCP)的位置和刀具姿势的坐标系。刀具坐材系必须事先进行设定.位定义时。将由机械接口坐标系代替刀具坐标系。
fanuc机器人维修的步骤有点长,注意看哦!
· 记录一下报警代码:
观察机器人示教器的操作界面,记录下法兰克机械臂驱动器报警代码。这些代码是诊断问题关键的线索来的。
· 外面的检查:
看看驱动器外表是不是有明显的损坏或是异常,例如看看电源线、信号线是不是完好无损,接口是否松动或损坏等。
· 电源与连接检查:
检查一下法那科机械手电源线的连接牢不牢固,确保没有老化或是破损的现象。
使用万用表等检查工具,查看电源电压在不在正常范围数值内。
确保机器人和控制器之间的连接稳固,并检查电缆连接器有没有插紧。
用温度计和万用表等等的工具来监测电机和驱动器的温度及电压。
如果发现驱动器温度太高或是电压出现异常,应该立即停机检查散热系统和电源系统。
· 更换损坏部件:
根据发那科工业机械手故障诊断的结果,更换坏了的机械手驱动器部件或是电路板。不过要确保更换的部件与原始部件兼容,并符合标准。
· 功能测试:
在发那科机器人维修完成后,对机器人进行功能测试,确保驱动器正常工作。验证机器人的运动精度、速度和稳定性等性能指标能不能满足要求。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
相关资讯
- FANUC发那科机器人驱动模块过热维修(2025-12-06)
- 发那科机器人A06B伺服驱动器报警维修(2025-12-03)
- FANUC发那科机器人主轴驱动器缺相维修(2025-11-20)
- 发那科机器人驱动器过热维修(2025-11-11)
- 发那科喷涂机器人驱动器无法启动维修(2025-11-05)
- 发那科机器人A06B-6079-H206驱动器缺相维修(2025-10-22)

声明:本站提及的品牌仅用于说明维修机型,本公司未获得品牌授权,非官方授权售后。子锐机器人是一家独立的第三方机器人技术服务商,为客户提供更高效率、更优成本、更全服务的选择。
