您现在的位置是:
-
能除船锈、会洗油罐 浙大海洋学院研制机器人在本土首先投用2020-05-18 发那科资讯
宽约1米的两轮小车紧贴着船板攀爬作业,与其他除锈爬壁机器人不同的是,这台由浙江大学海洋学院海洋电子与智能系统研究所朱世强教授团队研制的机器人,不仅效率相当于7个工人同步作业,还带有废水自回收装置,可收集超60%的作业废水。日前,这一本土研发设 ...[查看全文]
-
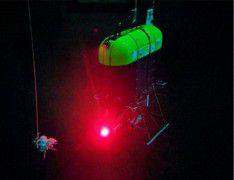 用于研究海洋“暮光地带”的机器人Mesobot完成海上试验
2020-07-29 发那科资讯
用于研究海洋“暮光地带”的机器人Mesobot完成海上试验
2020-07-29 发那科资讯据外媒报道,一种新型水下 机器人 已在加利福尼亚州蒙特利湾完成海上试验。由蒙特利湾水族馆研究所(MBARI),伍兹霍尔海洋研究所(WHOI)和其他合作伙伴开发的Mesobot是一种半自动机器人潜水器,旨在研究海洋中层水域暮光地带。 中层水域的深度在200到100 ...[查看全文]
-
难度高 用处大水下机器人:探索海洋非它不可2020-02-16 发那科资讯
据北京航空航天大学机器人研究所名誉所长王田苗介绍,传统的水下机器人的导航方式主要是航位推算、惯性导航以及多普勒声呐导航。但这些方式在长距离航行后会出现较大的累积误差。目前大多数水下机器人采用的组合式导航有效提高了精度,但误差仍然存在,机 ...[查看全文]
共1页/3条
相关搜索

Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7