您现在的位置是:
-
 伺服电机维修案例之038 脉冲计数不匹配(组 :i 轴 :j)
2018-03-26 伺服电机维修
伺服电机维修案例之038 脉冲计数不匹配(组 :i 轴 :j)
2018-03-26 伺服电机维修一、案例情形: SRVO - 038 Pulse mismatch (Group:i Axis:j) [现象] 电源断开时的脉冲计数和电源接通时的脉冲计数不同。在更换脉冲编码器之后 或者在更换脉冲编码器的备份用电池之后发出此报警。 此外,在将备份用数据读到主板中时发出此报警。 确认报警 ...[查看全文]
-
伺服电机维修案例之021 SRDY断开(组:i 轴 :j)
2018-03-26 伺服电机维修
一、案例情形: SRVO - 021 SRDY off (Group:i Axis:j) [现象] 当 HRDY 断开时,虽然没有其他发生报警的原因,SRDY 处在断开状态。 二、原因分析: (所谓 HRDY,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。 SRDY 是伺服相对于主 ...[查看全文]
-
伺服电机维修案例之003紧急时自动停机开关
2018-03-26 伺服电机维修
一、案例情形: SRVO - 003 Deadman switch released [现象] 在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 二、解决方法: [对策 1]按下紧急时自动停机开关并使机器人操作。 [对策 2]更换示教操作盘。 ...[查看全文]
-
伺服电机维修案例之002示教操作盘紧急停止
2018-03-26 伺服电机维修
一、案例情形: SRVO - 002 Teach pendant E-stop [现象] 按下了示教操作盘的紧急停止按扭。 二、解决方法: [对策 1]解除示教操作盘的紧急停止按扭。 [对策 2]更换示教操作盘。 ...[查看全文]
-
伺服电机维修案例之001操作面板紧急停止
2018-03-26 伺服电机维修
一、案例情形: 伺服 - 001 操作面板紧 急停止( SRVO - 001 Operator panel E-stop) [现象] 按下了操作箱/操作面板的紧急停止按扭。 二、原因分析: SYST-067 面板 HSSB 断线报警同时发生,或者配电盘上的 LED(绿色)熄灭时,主板(JRS11) -配电盘 ...[查看全文]
-
 FANUC机械手电路板维修之电阻法测试
2018-02-12 电路板维修
FANUC机械手电路板维修之电阻法测试
2018-02-12 电路板维修电阻法 电阻是各种电子元器件和电路的基本特征,利用万用表测量电子元器件或Fanuc机器人电路各点之间电阻值来判断故障的方法称为电阻法。 测量电阻值,有 在线和离线 两种基本方式。 在线测量,需要考虑被测元器件受其他并联支路的影响,测量结果应对照原理 ...[查看全文]
-
 FANUC发那科机械手臂示教器维修
2018-02-12 示教器维修
FANUC发那科机械手臂示教器维修
2018-02-12 示教器维修FANUC机械手控制系统故障示例分析 例1 FanucF-200iB七轴点焊机械手控制器断电检修后,对控制器送电,机械手报伺服故障,故障代码为SERVO-062。对此故障代码进行复位:按MENUSSYSTEMF1,[TYPE]找master/calF3,RES_PCAF4,YES后,机械手仍然报伺服故障。 故障 ...[查看全文]
-
 数字式交流伺服驱动单元的故障检测与维修
2018-02-12 伺服电机维修
数字式交流伺服驱动单元的故障检测与维修
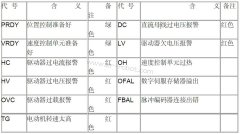
2018-02-12 伺服电机维修数字式交流伺服驱动单元的故障检测与维修 驱动器上的状态指示灯报警 FANUC S系列数字式交流伺服驱动器,设有11个状态及报警指示灯,指示灯的状态以及含义见表5-8 。 以上状态指示灯中, HC、HV、OVC、TG、DC、LV的含义与模拟式交流速度控制单元相同,主回路 ...[查看全文]
-
 R-2000iB/210F发那科焊接机器人维修实例
2018-02-12 焊接机器人保养
R-2000iB/210F发那科焊接机器人维修实例
2018-02-12 焊接机器人保养R-2000iB/210F发那科焊接机器人维修实例 R-2000iB/210F发那科焊接机器人在生产第一辆白车身时,出现所有的焊点整体偏移,后续生产情况类似,无任何故障报警。 根据故障现象,大致可以排除伺服部分故障,故障可能原因: ①机器人本体或机器人焊钳机械变形或偏 ...[查看全文]
-
 发那科焊接机械手伺服电机维修
2018-02-12 焊接机器人保养
发那科焊接机械手伺服电机维修
2018-02-12 焊接机器人保养发那科焊接机器人伺服电机维修 发那科焊接机器人伺服电机维修是一门复杂的技术服务行业。最近几年,发那科焊接机器人伺服电机使用越来越广泛,发那科焊接机器人伺服电机维修这种技术服务需求也越来越迫切。由于国内使用的发那科焊接机器人大都是进口产品,其 ...[查看全文]
-
 FANUC发那科伺服电机维修故障问题
2018-02-12 伺服电机维修
FANUC发那科伺服电机维修故障问题
2018-02-12 伺服电机维修FANUC发那科伺服电机维修故障包括:不能启动、启动无力、运行抖动、编码器报警、编码器磨损、编码器损坏、失磁、过电流、过载、跑位、输出不平衡、位置不准 一通电就报警 一通电就跳闸 磁铁爆钢卡死转不动 电机发热发烫维修 电机运转异常维修等 FANUC发那科 ...[查看全文]
-
发那科焊接机器人伺服电机维修2018-02-12 伺服电机维修
发那科焊接机器人伺服电机维修 发那科焊接机器人伺服电机维修是一门复杂的技术服务行业。最近几年,发那科焊接机器人伺服电机使用越来越广泛,发那科焊接机器人伺服电机维修这种技术服务需求也越来越迫切。由于国内使用的发那科焊接机器人大都是进口产品,其 ...[查看全文]
-
示教器按键膜A05B-2518-C200维修
2018-02-08 伺服电机维修FANUC (发那科)机器人-基本维护保养 一、 概述 定期保养机器人可以延长机器人的使用寿命, FANUC 机器人的保养周期可以分为日常三个月,六个月,一年,三年。 具体内容如下: 一、在这里具体描述如何更换电池和润滑油。 二、更换电池 FANUC 机器人系统在保 ...[查看全文]


Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7