�����ڵ�λ���ǣ�
-
 ���ɻ��������������Ľ������
2019-12-11 ���ǿ���Ѷ
���ɻ��������������Ľ������
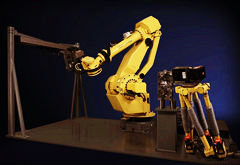
2019-12-11 ���ǿ���Ѷ���ɻ��������������Ľ������ �ڵ��Ի�����ʱ����������˴�����ͼ״̬(����J4���J6��ͬ��)���ᷢ��������MOTN-023����MOTN-063���ڴ�����£�������ֻ���ڹؽ�����ϵ���ƶ���������̬��Ϊ�����λ�á� ͼ1 �����������λ�� ��������J5�ᴦ��0��λ�ã� ...[�鿴ȫ��]
-
 һ�泵�����AGV�泵��Ӳ������
2019-08-14 ���ǿ���Ѷ
һ�泵�����AGV�泵��Ӳ������
2019-08-14 ���ǿ���Ѷһ�泵�����AGV�泵��Ӳ������ ��Ϊ����һ������AGV��ҵ�IJ泵��ҵ��һ�Ǵ�2014��Ϳ�ʼ����AGV�泵����Ӳ���г�����Ϊ�������ڶ�AGV��˾�ṩרҵ�����ϰ��˵�Ӳ�������������Ʒ�������̰��˳������̶Ѷ��ǰ��ʽ�Ѷ��ǣ�����ȡ� һ�泵�ܾ��� ...[�鿴ȫ��]
-
 ���ǿƺ��ӻ�������Ӧ���г����Ĺ��ϼ������ʩ
2018-05-09 ���ӻ����˱���
���ǿƺ��ӻ�������Ӧ���г����Ĺ��ϼ������ʩ
2018-05-09 ���ӻ����˱������Ľ����˷��ǿƺ��ӻ�������ʵ����������Ӧ���п��ܳ��ֵĹ��������磺ҧ�����⡢�������⡢�ɽ���������ȣ����ṩ�˽����ʩ����ӭ�ο� ...[�鿴ȫ��]
-
 �ŷ���������ź�046��ԭ�������
2018-05-08 �ŷ����ά��
�ŷ���������ź�046��ԭ�������
2018-05-08 �ŷ����ά�����Ľ������ŷ��Ŵ����������ʾ��SRVO�C046 SVAL2 OVC alarm (Group : i Axis : j)�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
 �ŷ���������ź�045��ԭ�������
2018-04-01 �ŷ����ά��
�ŷ���������ź�045��ԭ�������
2018-04-01 �ŷ����ά�����Ľ������ŷ��Ŵ����������ʾ��SRVO�C045 SVAL1 HCAL alarm (Group : i Axis : j)�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
 �ŷ���������ź�044��ԭ�������
2018-04-01 �ŷ����ά��
�ŷ���������ź�044��ԭ�������
2018-04-01 �ŷ����ά�����Ľ������ŷ��Ŵ����������ʾ��SRVO�C044 SVAL1 HVAL alarm (Group : i Axis : j)�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
 �ŷ���������ź�043��ԭ�������
2018-04-01 �ŷ����ά��
�ŷ���������ź�043��ԭ�������
2018-04-01 �ŷ����ά��һ���������� �ŷ��Ŵ�����ʾ�� SRVO043 SVAL1 DCAL alarm (Group : i Axis : j) �����źš� ����ԭ������� (���ͣ��ٴ����õķŵ���������������������ɢ����Ҫ���л����ˣ��ŷ��Ŵ����ṩ������������������ֱ��������ʱ��������ͨ������ת����������� ...[�鿴ȫ��]
-
 �ŷ���������ź�042��ԭ�������
2018-04-01 �ŷ����ά��
�ŷ���������ź�042��ԭ�������
2018-04-01 �ŷ����ά�����Ľ������ŷ��Ŵ����������ʾ��SRVO�C042 MCAL alarm (Group : i Axis : j)�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
�ŷ���������ź�023��ԭ�������
2018-04-01 �ŷ����ά��
���Ľ������ŷ��Ŵ����������ʾ��SRVO�C023 SVAL1 Stop error excess (Group : i Axis : j)�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
 �ŷ���������ź�022��ԭ�������
2018-03-30 �ŷ����ά��
�ŷ���������ź�022��ԭ�������
2018-03-30 �ŷ����ά�����Ľ������ŷ��Ŵ����������ʾ��SRVO�C022 SVAL1 SRDY on (Group : i Axis : j)�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
���ǿ�����·��007������ԭ����취
2018-04-01 ��·��ά��
���Ľ����˷��ǿƻ����˵�·����007 SVAL1 External E�Cstop�����źŵ�ԭ����취 ...[�鿴ȫ��]
-
�ŷ���������ź�006��ԭ�������
2018-04-01 �ŷ����ά��
���Ľ������ŷ��Ŵ����������ʾ��SRVO�C006 SVAL1 Hand broken�����źŵ�ԭ������ͽ���취 ...[�鿴ȫ��]
-
�ŷ���������ź�005��ԭ�������
2018-04-01 �ŷ����ά��
���Ľ����˷������ŷ��Ŵ�������ϵ�SRVO�C005 SVAL1 Robot overtravel������ԭ������ͽ�������� ...[�鿴ȫ��]
-
���ǿ�����·��004������ԭ����취
2018-04-01 ��·��ά��
���Ľ����˷��ǿƻ����˵�·����SRVO�C004 SVAL1 Fence open�����źŵ�ԭ����취 ...[�鿴ȫ��]
-
FANUC�ŷ���������������ȶ��ȹ��ϵ�ԭ��������������
2018-04-01 �ŷ����ά��
Fanuc �ŷ������Ӧ�������кܶࡣֻҪ��Ҫ�ж���Դ�ģ����ҶԾ�����Ҫ���һ�㶼�����漰���ŷ�������������ӡˢ�豸����װ�豸����֯�豸������ӹ��豸�������ˡ��Զ��������ߵȶԹ��վ��ȡ��ӹ�Ч�ʺ����ɿ��Ե�Ҫ����Խϸߵ��豸�� �ͻ��ڹ�ҵ���� ...[�鿴ȫ��]

Copyright © ������������˼�������˾��Ȩ���� �绰��15889988091 ��ַ�������з�خ�������ֽ�ɽ�ȴ���˽�1��109 ICP����ICP��15095857��-7