您现在的位置是:
-
 FANUC发那科弧焊机器人常见故障怎么处理
2019-12-18 维修案例
FANUC发那科弧焊机器人常见故障怎么处理
2019-12-18 维修案例自动弧焊机器人工作站一般由弧焊机器人及控制器、外围操作机连锁机构和焊接电源组成,在设备故障排除时可以根据故障代码并结合各模块进行设备维修。 1.弧焊机器人运动部位故障 弧焊机器人运动部位故障,该故障一般报警代码前缀为SRVO,出现该故障报警时需要 ...[查看全文]
-
 怎样进行弧焊的指令操作
2019-11-16 示教器维修
怎样进行弧焊的指令操作
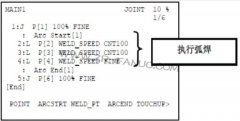
2019-11-16 示教器维修焊接指令是向机器人指示何时, 怎样进行弧焊的指令, 在执行弧焊开始和弧焊结束指令之间所示教的动作指令过程中进行弧焊。 # 弧焊开始指令指令开始进行弧焊。 # 弧焊结束指令指令完成弧焊。 弧焊开始指令弧焊开始指令是使机器人开始执行弧焊的指令。弧焊开始 ...[查看全文]
-
 发那科推出“极其紧凑”的新型弧焊机器人Arc Mate 100iD
2019-11-02 发那科资讯
发那科推出“极其紧凑”的新型弧焊机器人Arc Mate 100iD
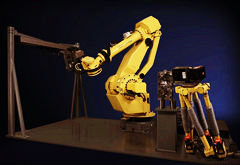
2019-11-02 发那科资讯发那科推出“极其紧凑”的新型弧焊机器人Arc Mate 100iD 发那科新型弧焊机器人 Arc Mate 100iD Fanuc表示,其新型弧焊机器人Arc Mate 100iD“极其紧凑”,是Arc Mate机器人系列的第一款型号,其前身是Arc Mate 100iC / 12。 截至2017年9月,Arc Mate 100iD ...[查看全文]
-
 发那科弧焊机器人编程故障如何修复
2018-04-10 焊接机器人保养
发那科弧焊机器人编程故障如何修复
2018-04-10 焊接机器人保养设备程序编写故障,该类故障一般出现在程序第一次编写时或者试运行时,排除该类故障需要编程人员认真检查程序内容并进行修改即可。下面结合两个例子进行说明 ...[查看全文]
-
 发那科弧焊机器人工作站弧焊寻位程序故障专业维修
2018-04-10 焊接机器人保养
发那科弧焊机器人工作站弧焊寻位程序故障专业维修
2018-04-10 焊接机器人保养弧焊机器人工作站弧焊寻位程序故障,此类故障的报警前缀一般为THSR,该类故障应着重检查与寻位相关的参数设置、硬件连接和寄存器状态。下面结合两个例子进行说明。 (1)FANUCM10i弧焊机器人配备R30iB控制系统在正常工作中出现报警THSR-030还没有搜查开始, ...[查看全文]
-
 极其紧凑!发那科新型弧焊机器人Arc Mate 100iD狭窄也能作业
2018-05-10 发那科资讯
极其紧凑!发那科新型弧焊机器人Arc Mate 100iD狭窄也能作业
2018-05-10 发那科资讯新的Arc Mate 100iD焊接机器人,具有卓越的运动性能,降低安装成本,从而显着提高了客户的生产效率。此外,它可以通过其新的图形用户界面直观地操作。 Fanuc欧洲电弧焊接和激光机器人产品经理Matteo Ferrari如此说道。 Arc Mate 100iD焊接机器人 Fanuc方面称 ...[查看全文]

Copyright © 广州子锐机器人技术有限公司版权所有 电话:15889988091 地址:广州市番禺区东环街金山谷创意八街1号109 ICP:粤ICP备15095857号-7