�����ڵ�λ���ǣ�
-
 ���ǿ�FANUC������KAREL������������
2019-12-30 ʾ����ά��
���ǿ�FANUC������KAREL������������
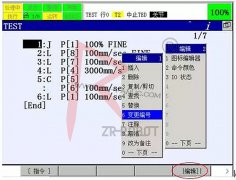
2019-12-30 ʾ����ά��KAREL����֧�ֹ��ܵ����� ֮ǰ����ʹ��ShiftFWD�ķ�ʽִ���ֶ�ִ��PC���������ʵ��������TP�����̨��һ���Ĺ��ܣ�����Ҫʹ��KAREL����֧�ֹ��ܡ�ʹ��KAREL����֧�ֹ��ܣ���Ҫ���Ӷ����������J971����KARELUseSprtFCTN�������ѡ�����ֻ�е������� ...[�鿴ȫ��]
-
 ���ǿ�FANUC������ץȡ������
2019-12-27 ά�ް���
���ǿ�FANUC������ץȡ������
2019-12-27 ά�ް���1:TIMER[1]=RESET 2:TIMER[1]=START 3:UTOOL_NUM=1 [��������ϵ1] 4:UFRAME_NUM=1 [�û�����ϵ1] 5:OVERRIDE=50% [�ٶ�50%] 6:D0[101]=OFF [������ץ�ֹر�״̬] 7:WAIT DI[105]=ON [��ԭ���ź�] 8:WAIT DI[101]=ON [������ץ��ԭλ���Կ���] 9:J P[1] 50% F ...[�鿴ȫ��]
-
 ���ǿ�Fanuc������ָ��༭��ȫ
2019-12-25 ʾ����ά��
���ǿ�Fanuc������ָ��༭��ȫ
2019-12-25 ʾ����ά������༭���棬�ڱ༭��EDCMD������һϵ�еĹ���ѡ������ص�Ա����š�ȡ������Ϊ��ע������������ϸ���ܡ� 1.�����ţ�Renumber�� ��ѡ��Ĺ��������ǣ�������ʽ���ӹ�������������϶��¸��������λ�ñ����µ�λ�ñ�ţ�ʹ�����е�λ�ñ�Ÿ��� ...[�鿴ȫ��]
-
 ���ǿ�FANUC�����˳����ע��ȫ����
2019-12-19 ά�ް���
���ǿ�FANUC�����˳����ע��ȫ����
2019-12-19 ά�ް���1.�ȵ��MENU-����-���� 2.���Remark�� 3.��ʾ��������ͼ��ʾ 4.��ENTER�� 5.����ע������ ���������ɣ� ...[�鿴ȫ��]
-
 ���ǿ�FANUC�����˱�д�ij�����ϸ�̳�
2019-12-03 ά�ް���
���ǿ�FANUC�����˱�д�ij�����ϸ�̳�
2019-12-03 ά�ް���RobotΪ�Զ����豸�������Զ�����ת֮ǰ�������ȸ���RobotҪ�Զ������Щ����������дRobot���ɴﵽ��Ŀ�ġ� Robot������Ҫ�ɡ�����ָ����ɣ�ֻҪ��Ϥ�ֶ�����Robot�ķ�ʽ����Robot�ƶ�������䛵�λ�ã������ڡ��̵㡹��ͬʱ��ɶ���ָ����Robot ...[�鿴ȫ��]
-
 ���ǿ�FANUC��������ô��������
2019-11-16 ʾ����ά��
���ǿ�FANUC��������ô��������
2019-11-16 ʾ����ά������ ��¼�����¼����¼ʱ������һ���µĿճ��� �趨������ϸ��Ϣ�趨������ϸ��Ϣʱ���趨��������ԡ� �ı�ָ������ı�ָ�����ʱ�������趨����ָ���ʾ��ʱҪʹ�õı�ָ� ʾ�̶���ָ��ʾ�̶���ָ��ʱ���Զ���ָ��Ͷ�������ָ��� ...[�鿴ȫ��]
-
 ���ǿƻ��������˱�̹��������
2018-04-10 ���ӻ����˱���
���ǿƻ��������˱�̹��������
2018-04-10 ���ӻ����˱����豸�����д���ϣ��������һ������ڳ����һ�α�дʱ����������ʱ���ų����������Ҫ�����Ա������������ݲ������ļ��ɡ��������������ӽ���˵�� ...[�鿴ȫ��]
-
 ���ǿƻ��������˹���վ����Ѱλ�������רҵά��
2018-04-10 ���ӻ����˱���
���ǿƻ��������˹���վ����Ѱλ�������רҵά��
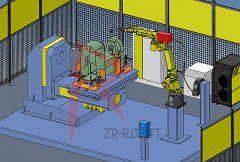
2018-04-10 ���ӻ����˱������������˹���վ����Ѱλ������ϣ�������ϵı���ǰһ��ΪTHSR���������Ӧ���ؼ����Ѱλ��صIJ������á�Ӳ�����ӺͼĴ���״̬���������������ӽ���˵���� ��1��FANUCM10i�����������䱸R30iB����ϵͳ�����������г��ֱ���THSR-030��û���Ѳ鿪ʼ�� ...[�鿴ȫ��]

Copyright © ������������˼�������˾��Ȩ���� �绰��15889988091 ��ַ�������з�خ�������ֽ�ɽ�ȴ���˽�1��109 ICP����ICP��15095857��-7